云南非标机器人机器人
关键词: 云南非标机器人机器人 机器人

 2023.05.05
2023.05.05
文章来源:
桁架装卸机械手主要由三部分组成:手部机构 运动机构和控制系统。桁架机械手手是用来抓取工具的部件。根据所抓物体的形状 大小 重量 材质和操作要求,有夹持式、握持式、吸附式等多种结构形式。运动机构,它使手能够完成各种旋转(摆动)、运动或复合运动以达到规定的动作,改变所抓握物体的位置和姿态。桁架机械手的运动机构一般由液压、气动和电气装置驱动。机构的升降、伸缩、旋转等单独运动模式称为机械手的自由度。为了抓取空间中任何位置和方向的物体,需要六个自由度 它是机械手设计的关键参数 自由度越多,机械手的灵活性和通用性就越大,其结构也就越复杂。一般针对机械手有2~3个自由度。由于人工操作成本高、质量控制难、生产效率低等问题,现生生产企业将采用机器人进行生产,既满足了企业对产品的要求,又降低了企业的人力成本。桁架装卸机械手广泛应用于数控机床中,在传统工艺中,一个工人只能操作一台数控机床,而数控机床的操作人员也属于技术活动,所以一般企业支付的工资并不是很低,导致企业成本很高。通过将改装后的数控机床与桁架装卸机械手匹配,不仅比较大提高了企业的生产效率,而且应用数控机床机械手后,一个操作工可以守护三台机器,人力成本也比较大降低。浙江勃展工业自动化设备有限公司致力于自动化机器人,有想法的可以来电咨询!云南非标机器人机器人

伺服电动机与位置检测传感器、速度检侧传感器、制动器或减速器等各元、部件组成的整体部件称驱动单元。液压驱动器在机器人中应用多的是液压缸(直线式或摆动式),液压缸和伺服阀或比例阀也可组成液压伺服机构。气动式主要是气缸和气动马达。通常的操作机构中的基本部件是手仲和手腕,它由旋转运动和往复运动的机构组成。其结构形式一般为空间或平面机构,多数机器人的手臂和手腕是由关节和杆件构成的空间机构,一般由3~10个自由度组成,工业机器人一般为3~6个自由度。由于机器人具有多自由度手嘴、手腕的机构,使操作运动具有通用性和灵活性。末端执行器是机器人手腕末端机械接口所连接的直接参与作业的机构,如夹持器、焊钳、焊枪、喷枪或其他作业工具、传感器等。移动装置分为轮式、履带式、步行式等几种,也可用如螺旋浆式的其他形式的推进机构。工业领域应用的机器人多采用轮式机构。感知器可分为两种主要类型,即:感知机器人内部运动状态的内部感知器和感知外界环境状态信息的外部感知器。感知器基本上由各类传感器组成。因此,机器人所用传感器可分为内部信息传感器和外部信息传感器。机器人的内部信息传感器主要用于检测机器人运动状态的位里、速度和加速度等信息。云南机器人哪里有上下料机器人,就选浙江勃展工业自动化设备有限公司,有需求可以来电咨询!

上下料机械手,自动机械手,平衡吊及安装悬,真空搬运真空吸,搬运机械手,真空吊具,真空吸吊机,定位夹具,工装夹具,快速夹具,机床夹具,车床夹具,气动夹具,机械手夹具,电控夹具,机器人治具夹具,自动化冲压机器人,2)驱动器(Actuator)将电能或流体能转换成机械能的动力装置旷3)末端操作器(EndEffector)位于机器人腕部末端、直接执行工作要求的装置。如夹持器、焊枪、焊钳等。4)位姿(Pose)工业机器人末端操作器在指定坐标系中的位置和姿态。直线运动机器人,三轴机器人,六自由度机器人,上下料机器人,上下料机械手,拆包机器人,搬运机器人5)工作空间(WorkingSpace)工业机器人执行任务时,其腕轴交点能在空间活动的范围。6)机械原点(MechanicalOrigin)工业机器人各自由度共用的,机械坐标系中的基准点。7)工作原点(WorkOrigin)工业机器人工作空间的基准点。8)速度(Velocity)机器人在额定条件下,匀速运动过程中,机械接口中心或工具中心点在单位时间内所移动的距离或转动的角度。9)额定负载(Ratedload)工业机器人在限定的操作条件下,其机械接口处能承受的最大负载(包括末端操作器),用质量或力矩表示。10)重复位姿精度(PoseRepeatability)工业机器人在同一条件下,用同一方法操作时。
桁架机器人系统包括由移动式或固定式的操作机、电源、控制系统以及操作并监控桁架机器人的装置、外部设备或传感器的通讯接口所组成的全自动桁架机器人控制装置(硬件和软);末端执行器;桁架机器人完成作业所需的外部设备、装置或传感器。所用的外部设备均由桁架机器人的控制系统管理。桁架机器人机器臂的控制在电动伺服系统中,驱动机械臂各关节的是步进电机或直流伺服电机。步进电机从驱动器得到一系列脉冲信号,每个脉冲信号使步进电机轴产生一定的角位移。一般不需要反馈回路和位置编码器,控制比较简单。采用直流伺服电机的控制系统以测速器和角度编码作为反馈装置,能够精确地控制机械臂关节轴的运动,它的工作状态平稳,旋转速度可以连续调节,对加速和减速指令都能迅速作出反应。腕部机构支承桁架机器人手部装置并调整其姿态,一般有2-3个自由度,使位于机械臂末端的手爪产生俯仰摆动和绕自身轴线的转动,这些运动的合成,使桁架机器人的手部相对于操作对象形成灵活的工作姿态。六轴机器人,就选浙江勃展工业自动化设备有限公司,用户的信赖之选,有需要可以联系我司哦!

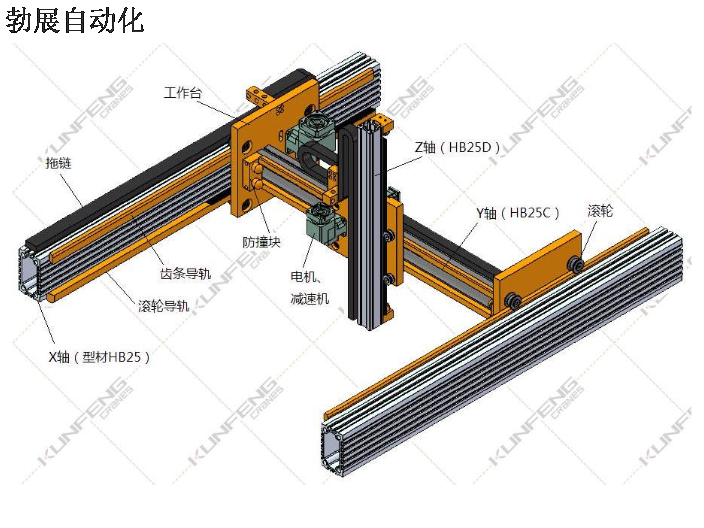
桁架机械手的任务是协助或代替完成各种预期任务,减少工业生产中的体力劳动工作量,可以代替人类从事危险的、重复性的工作。。在机械设备等工程机械的应用中,桁架操纵在物料搬运、多夹持和作业设备方面尤为突出,可成倍提高生产效率,降低人工成本,是企业的主要开支。桁架机械手是一种基于直角X、Y、Z三坐标系的全自动工业设备,可以调整工件的位置或实现工件轨迹的移动。桁架机械手采用全新的PLC控制技术和伺服控制技术,使机械手工作效率更高,使用更灵活,过程更安全方便。整个工艺过程由机械手控制系统自动完成,可实现智能视觉、自动报警等功能。所有组合都可以在一个区域完成,可以实现车床、加工中心、刀具成型机、电火花机、磨床等刀具的自动化生产。首先是它可以替代人们无法从事的危险工作。其次,桁架机械手平时工作时不需要休息。正确使用桁架机械手可以提高生产加工效率。以上三点属于使用时社会带来的桁架机械手的作用。桁架机器人,就选浙江勃展工业自动化设备有限公司,欢迎客户来电!江西机床机器人设备
浙江勃展工业自动化设备有限公司致力于自动化机器人,有需要可以联系我司哦!云南非标机器人机器人
BZR,JILIWEI,CRP是一家集研发、生产及销售于一体的高科技企业,专注于桁架机器人,关节机器人,料仓,工业自动化配件生产及配套设备的研究及制造,为广大企业提供一站式技术解决方案。公司建立之初就认为细节决定成败,态度决定一切是一个企业重要的一点,我们公司是生产型的企业,一直坚持要与客户共赢,共同发展。我们不断奋发图强、开拓进取,迎接企业新的腾飞。公司实力雄厚,拥有先进的精密的生产设备及检测仪器,公司拥有一支由经验丰富的工程师和**组成科研团队,凭借力量和精湛工艺生产、制造出质量过硬的桁架机器人,关节机器人,料仓,工业自动化配件等产品。桁架机器人,关节机器人,料仓,工业自动化配件产品远销国内等地区,并赢得客户认可和信任,公司将适应时代发展,创造新的价值,与新老客户一起共创佳绩,续创辉煌。云南非标机器人机器人
浙江勃展工业自动化设备有限公司属于机械及行业设备的高新企业,技术力量雄厚。勃展工业自动化是一家私营有限责任公司企业,一直“以人为本,服务于社会”的经营理念;“诚守信誉,持续发展”的质量方针。公司拥有专业的技术团队,具有桁架机器人,关节机器人,料仓,工业自动化配件等多项业务。勃展工业自动化自成立以来,一直坚持走正规化、专业化路线,得到了广大客户及社会各界的普遍认可与大力支持。




- 浙江高精度桁架机械手主要参数 2025-10-11
- 江西长行程桁架机械手加盟费用 2025-10-11
- 上海快速换模桁架机械手直供 2025-10-11
- 上海塑料成型桁架机械手工厂直销 2025-10-11
- 山东快速换模桁架机械手诚信合作 2025-10-11
- 湖南耐腐蚀桁架机械手哪里有 2025-10-11
- 江西医药行业桁架机械手厂家直销 2025-10-11
- 四川快速换模桁架机械手批发价格 2025-10-11





- 01 全桥式刮泥机制造厂
- 02 光伏行业TOYO机器人直线模组
- 03 南昌立式离心机定制
- 04 盐城数控液压主轴市场报价
- 05 徐州半导体管道供应
- 06 EPS欧式装饰构件设备
- 07 安徽国内斗杆重量
- 08 江西高精度防爆液压机
- 09 四川电动立式注塑机商家
- 10 常州大型整纬机