辽宁3D达明机器人机构
关键词: 辽宁3D达明机器人机构 达明机器人

 2024.11.01
2024.11.01
文章来源:
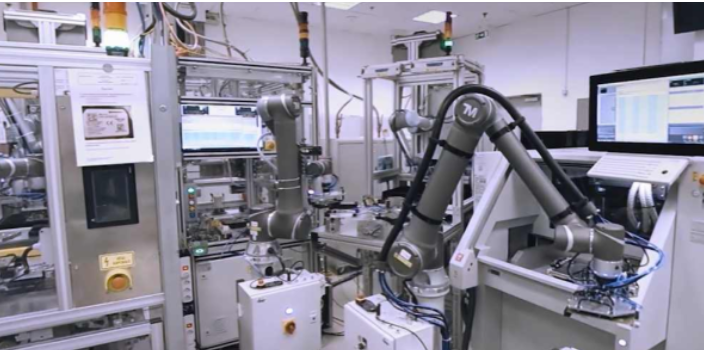
TM3DVision视觉应用。达明机器人3D视觉功能,无须再整合外部控制器,可在TMFlow中实现3D视觉的校准和编辑应用,实现即插即用,快速导入。提供3种建构比对物体功能。1.汇入CAD模型。2.指定基础几何形状(如球体、圆柱体、盒体等)。3.现场直接拍摄,创建产品的模型。可辨识多种工件,整合至TMflow编程灵活。3D随机取放后亦可使用TMRobot原有2D视觉二次定位。设定外部环境参数,自动匹配碰撞侦测功能,极限位置和有碰撞风险的位置会提前预警。达明机器人,就选达明机器人(上海)有限公司,用户的信赖之选,有需求可以来电!辽宁3D达明机器人机构

众所周知,钢板有磁性,一般采用磁性分张器来进行板料分张,通过磁性分张器的强磁来磁化板料,板料磁化后相邻板料的磁性极性相同,利用同性相斥的原理分开相邻的板料。但是铝钣金没有磁性,不能被磁化,因此磁性分张器不能分开铝钣金板料。数控机床上下料。为了确保每次只抓取一张板材,达明机器人内建视觉,整合即插即用配件,精细定位拿起板材,测量板材的重量,检查是否有双层板材。并通过的landmark技术保证上下料位置在不固定、偏移或倾斜时,也能进行位置补偿,确保钣金每次都能正确定位。并使用三个传感器将钣金准确定位在夹具和X量规块上。这一过程有助于确保准确性和一致的结果,并能尽量减少制造过程中的错误。提高了工作的广度和宽度,提高了劳动效率。辽宁3D达明机器人机构达明机器人(上海)有限公司是一家专业提供达明机器人的公司,有需求可以来电!

达明机器人TMOperator系列——TMPalletizingOperator,是一款强调可立即应用的智能堆栈专属操作系统单元,内含应用导向软件,协助用户轻松设置栈板规格,事前进行堆栈仿真与碰撞侦测,将以往需要三个月到半年整合的时间,缩短至五分钟即可完成智能堆栈设定,即可马上上工。TMPalletizing智慧堆栈完整解决方案,为中国台湾荣获国际第三方安全认证ISO10218-2的智能堆栈系统模块,另外也荣获CE、13849-1的国际认证,适合使用于仓储物流、食品业及制造业。
取放料应用(Pick&Place)▪使用TMLandmark,弹性布置手臂与周边位置▪2DVision,高定位精度,重复误差±▪3DVision,支持散乱堆栈取料应用、非平面物体定位▪无需围栏。自主移动机器人AMR▪使用TMLandmark,智能补偿自走车辆到定位的重复误差▪M系列,DC电源的输入,易于AMR整合。智慧堆栈(SmartPalletizing)▪使用TMLandmark,加速定位来料位置▪2DVision,来料不固定与分类▪支持同时2种箱堆栈,换栈,解栈▪整合立柱控制比较高可以堆到。焊接应用(Welding)▪TMflow用户接口让焊接教导更简单▪简单操作,手拉直接教导,程序自动生成路径,数分钟内即可开始焊接作业▪焊接的参数设定页面,包含电压/电流/速度/摆弧等常用功能▪拥有焊机设定接口,可快速设定手臂与焊机间的通讯控制,支持市面上常用焊机。达明机器人,就选达明机器人(上海)有限公司。

众所周知,钢板有磁性,一般采用磁性分张器来进行板料分张,通过磁性分张器的强磁来磁化板料,板料磁化后相邻板料的磁性极性相同,利用同性相斥的原理分开相邻的板料。但是铝钣金没有磁性,不能被磁化,因此磁性分张器不能分开铝钣金板料。数控机床上下料。为了确保每次只抓取一张板材,达明机器人内建视觉,整合即插即用配件,精细定位拿起板材,测量板材的重量,检查的是否有双层板材。并通过的landmark技术保证上下料位置在不固定、偏移或倾斜时,也能进行位置补偿,确保钣金每次都能正确定位。并使用三个传感器将钣金准确定位在夹具和X量规块上。这一过程有助于确保准确性和一致的结果,并能尽量减少制造过程中的错误。提高了工作的广度和宽度,提高了劳动效率。达明机器人(上海)有限公司为您提供达明机器人,欢迎您的来电!重庆冲压达明机器人推荐
达明机器人,就选达明机器人(上海)有限公司,让您满意,有想法可以来我司!辽宁3D达明机器人机构
TMRobotManagementAPI,这是一套让使用者可以在自家厂内的自动化管理系统内,链接达明协作手臂以进行数据监控的API。可供系统整合人员、软件开发人员做进一步的应用。目前推出的版本,主要功能为读取、搜集达明手臂的信息。预计8月还将推出Advance进阶版本,并新增可取得TMRobot控制权的功能、控制机器人控制棒的功能(不含E-STOP,M/A等按钮)、切换显示手臂运行项目、更新手臂项目VarSync变量、写入Modbus、下载手臂项目至Client端等,且同样具有数据整合性、可跨系统环境、免安装等特点。辽宁3D达明机器人机构



- 浙江包装达明机器人图片 2024-11-01
- 浙江仓库搬运达明机器人定制 2024-10-31
- 浙江涂胶达明机器人制作 2024-10-31
- 江苏液压达明机器人配件 2024-10-31
- 广州灵活识别达明机器人定制 2024-10-30
- 江苏加工机床达明机器人价格 2024-10-30
- 仓库搬运达明机器人控制 2024-10-30
- 北京餐饮零售达明机器人厂家 2024-10-29





- 01 温州户外储能插头报价
- 02 铜陵电池盒主控线束批发价格
- 03 河北TB接线端子销售厂
- 04 东莞保险丝供应商
- 05 山东不锈钢扣重载连接器厂家电话
- 06 江西塑封保险丝
- 07 福州仪器扭矩传感器直销
- 08 苏州精密连接器哪种好
- 09 WINCOM万代触控滚轮按键多少钱
- 10 江苏HE-016重载连接器厂家