非接触位移计算法
关键词: 非接触位移计算法 位移计

 2025.01.05
2025.01.05
文章来源:
不同型号、品牌和功能的位移计价格有所差异。以下是一些常见的位移计价格范围供参考:便携式位移计通常价格在100美元到500美元之间,适合简单的测量任务,如建筑、机械和土木工程中的位移测量。桌面式位移计价格范围从500美元到2000美元不等,通常具有更高的精度和更多的功能选项,适用于实验室和工业环境中的位移测量。高精度位移计价格通常在2000美元以上,具有非常高的精度和稳定性,适用于精密测量和科学研究领域。需要注意的是,以上价格供参考,实际价格可能会因市场供需、地区差异和特殊要求而有所变化。建议您在购买前与供应商或经销商联系,以获取准确的报价和详细信息。位移计可以用于测量地下管道的位移和变形。非接触位移计算法
位移计的测量原理有多种,以下是几种常见的位移计测量原理的介绍:光学位移计:光学位移计利用光学原理来测量位移。它由光源、光学传感器和测量物体组成。光源发出光线,经过物体反射后被光学传感器接收。通过测量光线的强度、相位或干涉等参数的变化,可以确定物体的位移量。电阻式位移计:电阻式位移计利用电阻的变化来测量位移。它由电阻元件和测量电路组成。当物体发生位移时,电阻元件的长度或截面积会发生变化,导致电阻值的变化。测量电路可以通过测量电阻值的变化来确定物体的位移量。压电位移计:压电位移计利用压电效应来测量位移。压电材料具有特殊的电荷分布结构,当施加力或压力时,会产生电荷的不均匀分布,从而产生电势差。通过测量电势差的变化,可以确定物体的位移量。拉线位移计:拉线位移计利用拉线的伸缩来测量位移。它由固定的参考点、可移动的测量点和连接两者的拉线组成。当物体发生位移时,拉线会伸缩,导致测量点相对于参考点的位置变化。通过测量拉线的伸缩量,可以确定物体的位移量。位移计频率成都中科图测的位移计可实现远程数据传输和监测。

位移计通常输出模拟信号,主要是电压信号或电流信号。它是一种用于测量物体的位移或变形的传感器,能够将物体的位移转换为相应的电信号输出。常见的位移计包括电阻式位移计、电容式位移计和电感式位移计等。这些位移计的工作原理不同,但都能将位移转换为电信号输出。其中,电阻式位移计是最常见的一种,它利用电阻的变化来测量位移。当物体发生位移时,位移计中的电阻值会相应变化,从而改变电路中的电流或电压。通过测量电流或电压的变化,可以获得物体的位移信息。
选择仪器安装位置对于测量结果至关重要。若选择不当,可能会增加测量误差。为了解决这个问题,应根据具体的测量需求选择适合的安装位置,并遵循仪器说明书中的建议。另外,连接仪器与被测对象也需要注意。位移计需要正确连接到被测对象上,以实现位移的测量。若连接方式不正确或连接不牢固,可能会导致测量误差。为了解决这个问题,应确保连接方式正确,并使用适当的连接件进行连接。此外,仪器的读数可能存在一定的误差,需要进行误差校正。为了解决这个问题,可以根据仪器说明书中的校正方法进行校正,或使用校准设备进行校正。位移计可以用于测量电力线路的位移。

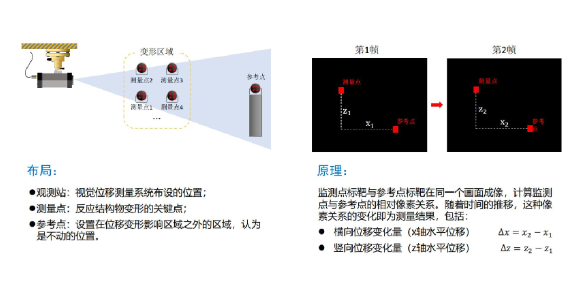
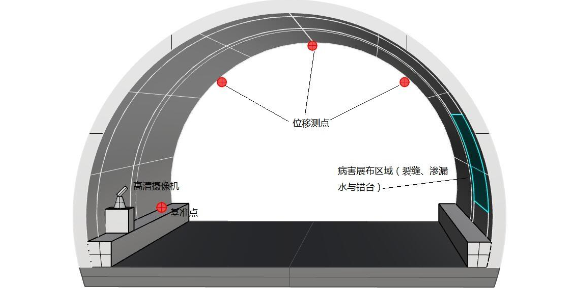
Ziki-M图像位移测量系统的应用可以分为以下几个方面:1.隧道施工过程中的位移监测在隧道施工过程中,由于地质条件的不同,隧道内部的变形和位移情况也会有所不同。为了确保隧道施工的安全和稳定,需要对隧道内部的变形和位移进行实时监测。Ziki-M图像位移测量系统可以通过对隧道内部的图像进行分析,实现对隧道内部的位移和变形的实时监测,及时发现隧道内部的变形和位移情况,为隧道施工提供有力的支持。2.隧道施工后的位移监测隧道施工完成后,隧道内部的变形和位移情况仍然需要进行监测。Ziki-M图像位移测量系统可以通过对隧道内部的图像进行分析,实现对隧道内部的位移和变形的实时监测,及时发现隧道内部的变形和位移情况,为隧道使用和维护提供有力的支持。3.隧道灾害后的位移监测在隧道发生灾害后,隧道内部的变形和位移情况需要进行监测。Ziki-M图像位移测量系统可以通过对隧道内部的图像进行分析,实现对隧道内部的位移和变形的实时监测,及时发现隧道内部的变形和位移情况,为隧道灾害的处理提供有力的支持。4.隧道使用过程中的位移监测隧道使用过程中,隧道内部的变形和位移情况也需要进行监测。Ziki-M图像位移测量系统可以通过对隧道内部的图像进行分析。位移计可以用于测量水位的变化。高精度位移计案例
位移计可以用于测量地质构造的位移。非接触位移计算法
相机位移计是一种用于测量相机在空间中的位移和姿态变化的设备。它通常由多个传感器和计算单元组成,能够实时地监测相机的位置和方向,并将这些数据用于各种应用,如虚拟现实、增强现实、机器人导航等。相机位移计的工作原理通常基于传感器技术,包括惯性测量单元(IMU)、全局定位系统(GPS)、视觉传感器等。这些传感器能够感知相机的加速度、角速度、方向等信息,并将其转化为数字信号,供计算单元进行处理。在相机位移计中,IMU是蕞常用的传感器之一。它由加速度计和陀螺仪组成,能够测量相机的线性加速度和角速度。通过积分这些测量值,可以得到相机的速度和位移。然而,由于积分的误差会随着时间的推移而累积,所以IMU通常需要与其他传感器结合使用,以提高测量的准确性和稳定性。非接触位移计算法






- 01 清镇桌球台
- 02 家电行业人力资源管理系统价格
- 03 采掘行业在线人力资源管理系统
- 04 青白江区博兰斯勒立式钢琴售卖
- 05 资质代办怎么办理
- 06 佛山水果有机产品认证专业
- 07 马鞍山戴尔服务器哪家专业
- 08 附近救援咨询
- 09 梁溪区变更进出口代理价格
- 10 海盐seo优化短视频矩阵模板