江苏高刚性桁架机械手诚信合作
关键词: 江苏高刚性桁架机械手诚信合作 桁架机械手

 2025.10.10
2025.10.10
文章来源:
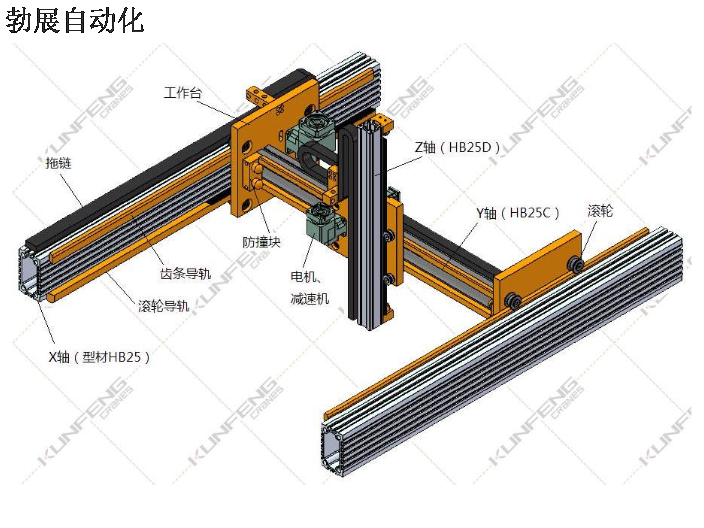
桁架机械手是能够实现自动控制、可重复编程、多功能、多自由度、运动自由度间成空间直角关系、多用途的操作机。具体所含有的特点有:可以在一些比较恶劣的环境中进行长期的工作。运行过程中,有着非常高的可靠性、速度以及精度性。可以根据用户所配套的操作工具不同,自身所携带来的功能也将会是不同。以上所述的三点,便是属于日常生活中市场上常见桁架机械手所含有的特点。桁架机械手的三大部件究竟是什么样子的。下面就请大家一起来看看吧!手部:桁架机械手的这个部位,往往是采用了丝杆螺母的结构。腕部:桁架机械手这个部位,则是采用了一个步进电机来带动涡轮杆。臂部:设备的这个部位,则是次用了滚珠丝杆来进行工作。以上所述的三点,便是属于在桁架机械手上的三部件样貌。浙江勃展工业自动化设备有限公司致力于提供 桁架机械手设备,欢迎您的来电!江苏高刚性桁架机械手诚信合作
桁架机械手的缺点:桁架机械手的高度长度及机械手臂的活动行程,一般根据机床外形的宽度和高度以及机床的结构尺寸量身定制,桁架机械手的这种特性导致其只适用于一种机床或者适用于外形尺寸接近(相差不超过100mm)和结构都大致相同的机床。桁架机械手比较大的缺点就是通用性较差。单机桁架机械手案例图片双联机桁架机械手案例图片多联机桁架机械手自动线案例图片二、关节机器人用于机械加工机床上下料的关节机器人采用的轴数一般为6轴,重复定位精度为±,常用的负载重量在10-50kg。关节机器人技术参数机床上下料机器人一般分为一对一、一对二(机床面对面摆放)、一对三(机床摆成品字形),如果想要1套关节机器人对多台机床上下料,需要加上地面轨道,可实现1台关节机器人对多台机床自动上下料。关节机器人的优点:关节机器人比较大的优点就是灵活性强,不受机床结构的限制,能适用很多机床。可拓展范围,除了用在机床上下料,关节机器人还可应用于打磨、抛光、焊接、装配、搬运码垛等领域。关节机器人的缺点:在机床上下料自动化项目中,机器人一般安装在机床的正面,且处于机床开口面即开关门的位置。给机床的日常换刀、调试、维护等操作带来一定的不便。福建食品行业桁架机械手推荐厂家浙江勃展工业自动化设备有限公司是一家专业提供桁架机械手设备的公司,有需求可以来电咨询!

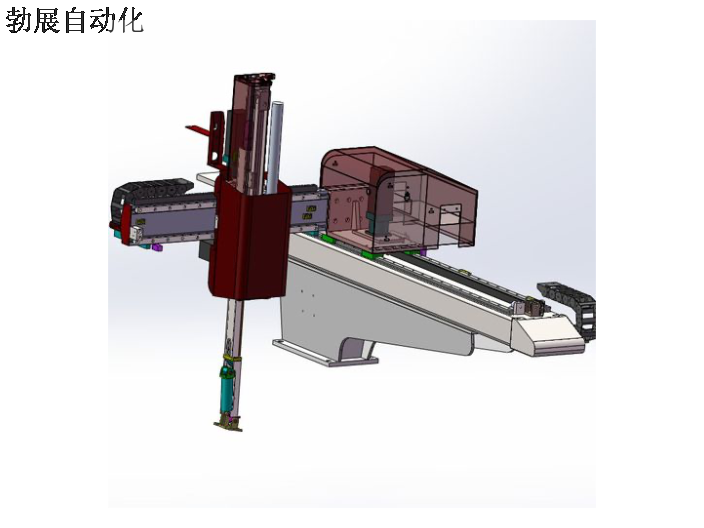
桁架机械手的立柱和料仓一般布置于机床的左右两侧,机械手臂在机床主轴正上方直上、直下的方式给机床进行自动上下料。桁架机械手按联机的方式分为单机桁架机械手、双联机桁架机械手、多联机桁架机械手自动线等几种型号;桁架机械手按负载重量又分为轻型桁架机械手、重型桁架机械手这两种型号。至于选用哪种桁架机械手型号,要根据产品的工艺和加工时间、产品的形状和重量以及用户的实际需要来选定。桁架机械手的优势:桁架机械手布置于机床的侧立面,占用空间小,便于机床的换刀、调试,维护等操作。另外桁架机械手造价较低,具有性价比高的优点。
桁架机械手的缺点:桁架机械手的高度和长度,以及机械手臂的活动行程一般根据机床外形的宽度和高度以及机床的结构尺寸量身定制,桁架机械手的这种特性导致其只适用于一种机床或者适用于外形尺寸接近(相差不超过100mm)和结构都大致相同的机床。桁架机械手比较大的缺点就是通用性较差。单机桁架机械手案例图片双联机桁架机械手案例图片多联机桁架机械手自动线案例图片二、关节机器人用于机械加工机床上下料的关节机器人采用的轴数一般为6轴,重复定位精度为±,常用的负载重量在10-50kg。关节机器人技术参数机床上下料机器人一般分为一对一、一对二(机床面对面摆放)、一对三(机床摆成品字形),如果想要1套关节机器人对多台机床上下料,需要加上地面轨道,可实现1台关节机器人对多台机床自动上下料。关节机器人的优点:关节机器人比较大的优点就是灵活性强,不受机床结构的限制,能适用很多机床。可拓展范围,除了用在机床上下料,关节机器人还可应用于打磨、抛光、焊接、装配、搬运码垛等领域。关节机器人的缺点:在机床上下料自动化项目中,机器人一般安装在机床的正面,且处于机床开口面即开关门的位置。给机床的日常换刀、调试、维护等操作带来一定的不便。桁架机械手设备,就选浙江勃展工业自动化设备有限公司,用户的信赖之选,欢迎新老客户来电!
桁架机械手功能:为了适应灵活的生产要求,桁架机械手系统所有控制功能应该整合,从而达到菜单管理的全套模式,主要包括滑块行程调整,平衡装置空气压力调整,气垫行程调整和自动控制系统设置参数。现场总线技术与通信网络设备互联、互动的可操作性,分散功能模块和开放功能是冲压控制技术的发展方向,对实现自动化具有明显的促进作用。按控制系统的集成可以实现媒体和模具的所有控制功能通过一个操作界面,包括故障诊断、模具菜单配置,可编程的限位开关,模具监控和调整等等,使设备的维护更方便,明显提高设备的有效工作时间。浙江勃展工业自动化设备有限公司是一家专业提供桁架机械手的公司,期待您的光临!上海高刚性桁架机械手价格
浙江勃展工业自动化设备有限公司桁架机械手设备获得众多用户的认可。江苏高刚性桁架机械手诚信合作
桁架机器人是一种大型的设备,其安全性与稳定性是首要考虑的,因此在设计时,需要进行应力分析。本文特鲁门小编为大家介绍一下桁机器人应力分析的步骤。第一步,确定应力分析的范围和目的首先我们需要根据桁架机器人具体的应用场景和需求,来确定应力分析的范围和目的,根据对特定部件的应力分布结果,来评估桁架机器人在不同工况下的稳定性等。第二步,选择合适的应力分析方法我们常见的应力分析方法有很多,如FEA有限元分析法、BEM边界元分析法、FDM有限差分分析法等,需要根据具体情况来选择合适的方法。第三步,建立模型根据桁架机器人的实际情况建立合适的模型,包括几何模型、材料属性、约束条件等。在模型中,各部件的形状、尺寸、材料等参数应尽可能精确,以获得更准确的分析结果。第四步,施加边界条件及载荷根据实际情况施加合适的边界条件和载荷,如重力、外部力、热载荷等。边界条件和载荷的大小、方向、作用点等应根据实际情况进行精确设定。第五步,进行计算和分析利用选定的分析方法进行计算,得出各部件的应力分布、蕞大应力值、变形量等结果,然后特鲁门根据分析结果,对桁架机器人的设计进行优化,提高其性能和稳定性。第六步。 江苏高刚性桁架机械手诚信合作




- 江西医药行业桁架机械手厂家直销 2025-10-11
- 四川快速换模桁架机械手批发价格 2025-10-11
- 江苏高刚性桁架机械手诚信合作 2025-10-10
- 江苏塑料成型桁架机械手批发 2025-10-10
- 浙江低维护桁架机械手加盟费用 2025-10-10
- 湖北新能源行业桁架机械手价格表 2025-10-10
- 安徽食品行业桁架机械手代理商 2025-10-10
- 江西快速换模桁架机械手推荐厂家 2025-10-10




- 01 镇江化学实验室系统服务商
- 02 安徽大型熔炉集尘罩壳商家
- 03 扬州工厂自动化上料机
- 04 江门标准型变压吸附制氮种类
- 05 辽宁储料仓石灰投加机器
- 06 大幅面激光打标机
- 07 浙江书籍SJQ平角圆角切角机值得推荐
- 08 深圳GEN测试系统厂家
- 09 上海油烟净化器设备厨房设备定制
- 10 新疆自动化抛丸机技术参数