青海机器人力控装配线
关键词: 青海机器人力控装配线 装配

 2025.12.03
2025.12.03
文章来源:
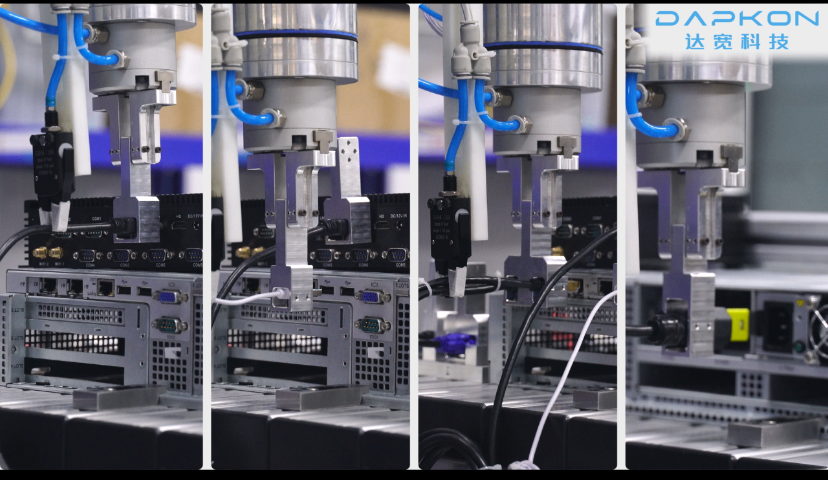
在机械制造领域,齿轮装配一直是一项对精度和稳定性要求极高的工作。传统的齿轮装配方式,往往依赖于人工操作或固定的自动化设备,难以应对齿轮尺寸的微小差异和装配过程中的不确定性,容易导致装配效率低下、产品质量参差不齐等问题。达宽科技的机器人力控齿轮装配方案,为这一难题提供了创新而有效的解决方案。力控装配技术通过在机器人上安装高精度的六轴力传感器,使机器人能够实时感知装配过程中齿轮所受的力,并根据预设的力控算法自动调整装配动作。当齿轮与轴进行啮合时,机器人可以根据实际受力情况,灵活地进行微调,确保齿轮能够准确无误地安装到位。这种精细的力控能力,不仅避免了因力过大而导致的齿轮损坏,还能够有效解决因齿轮或轴的尺寸偏差而造成的装配困难,极大地提高了装配的成功率和稳定性,为制造企业带来了更高效、更可靠的齿轮装配体验。达宽力控保障线束装配连贯性,减少中断,促使装配流程顺利推进。青海机器人力控装配线

达宽科技的力控装配技术在提升装配效率方面展现出了巨大的优势。传统的装配工艺往往依赖于固定的程序和轨迹,难以适应零件尺寸的微小变化和装配过程中的不确定性,导致装配效率低下。而机器人力控轴孔装配则完全不同,其在于对力的精确感知与实时反馈控制。在装配过程中,机器人能够根据实时监测到的力反馈信息,自动调整装配速度和力度,确保装配过程的平稳进行。例如,当遇到装配阻力增大时,机器人会自动降低速度并增加推力,避免卡顿和损坏;而当阻力减小时,又能迅速恢复正常的装配速度,从而缩短了单个产品的装配时间。此外,力控装配系统还具备自适应学习能力,能够不断优化装配策略,使得机器人的装配动作越来越流畅、高效。据统计,在采用达宽科技的力控装配方案后,企业的装配效率得到了提升,生产节拍更加紧凑,整体产能得到了有效释放,为企业在激烈的市场竞争中赢得了宝贵的时间优势。上海机器人柔性装配流水线达宽科技机器人力控装配方案,力控装配技术实时监测装配力,自动调整装配动作,确保电机齿轮精确啮合。
电机传动可靠性高度依赖齿轮啮合力矩的均衡性。人工装配易受操作经验差异影响,而达宽科技的力控装配通过数字化闭环控制,确保每套行星齿轮的压装深度与轴向压力稳定在工艺窗口内。在减速器制造中,系统严格限定轴承预紧力区间,避免过载导致的齿面磨损或预紧力不足引发的运行异响。装配过程生成的力-位移曲线报告为工艺优化提供量化依据,从源头提升产品可靠性。力控装配的重复精度优势减少了磨合期故障率,延长了齿轮箱使用寿命,同时降低返修成本,帮助企业实现质量均衡的规模化输出。
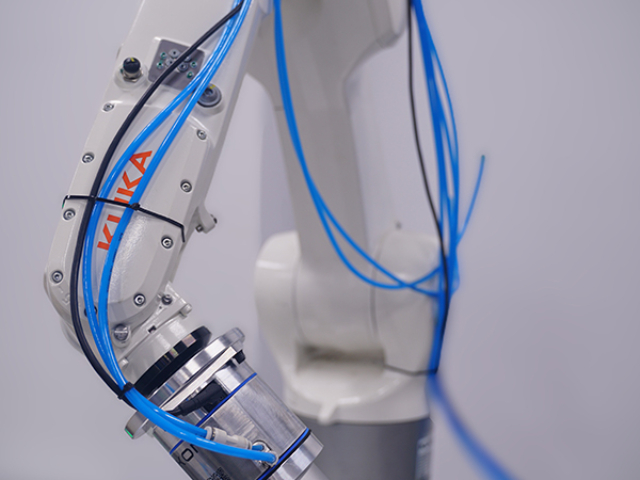
达宽科技在力控装配系统的设计过程中,始终关注用户操作体验的持续优化。系统提供的图形化编程界面大幅降低了技术门槛,操作人员无需专业机器人编程背景即可完成参数设置。通过直观的力波形图显示,用户能够实时监控装配过程中的力变化趋势,快速理解机器人与工件的交互状态。这种可视化交互方式使操作人员能够轻松掌握系统运行状态,提升工作信心和掌控感。当生产线需要切换不同车型线束时,用户可通过拖拽式指令调整力控参数,系统自动生成适配新工艺的装配路径,大幅减轻工程师的重复配置负担。达宽力控系统维持生产稳定,机器人稳定作业,确保线束装配流程顺畅进行。
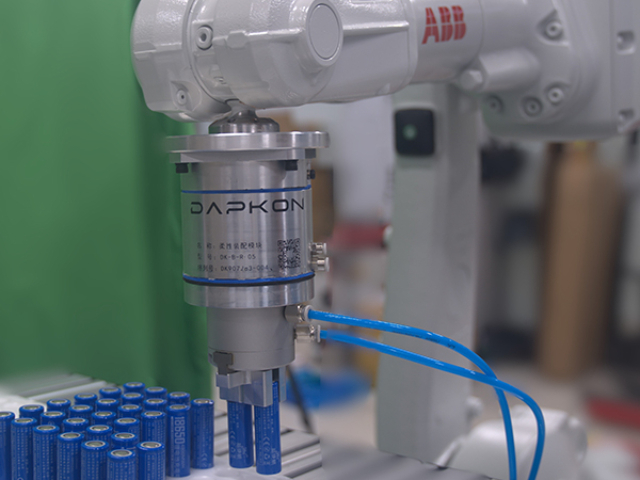
在汽车线束保险丝装配中,传统自动化设备因缺乏力觉感知,易导致插接偏移或接口损伤。达宽科技的力控装配方案通过高精度六维力传感器实时捕捉接触力数据,动态调整机器人末端姿态。当保险丝与接口存在微小位置偏差时,系统能自动补偿角度并优化插入轨迹,确保插接到位且无过盈损伤。这种自适应能力降低了人工调试需求,尤其适用于多型号线束的混线生产场景。达宽科技的力控技术还内置动态保护机制,如遇阻力异常立即触发柔性回撤,避免硬性碰撞造成的部件变形,从源头提升产品合格率。力控装配降低操作难度,工人借达宽力控机器人,经简单培训就能开展线束装配。广东机器人柔性力控装配线
达宽力控确保电机齿轮装配连贯,减少中断,推动装配流程稳步前行。青海机器人力控装配线
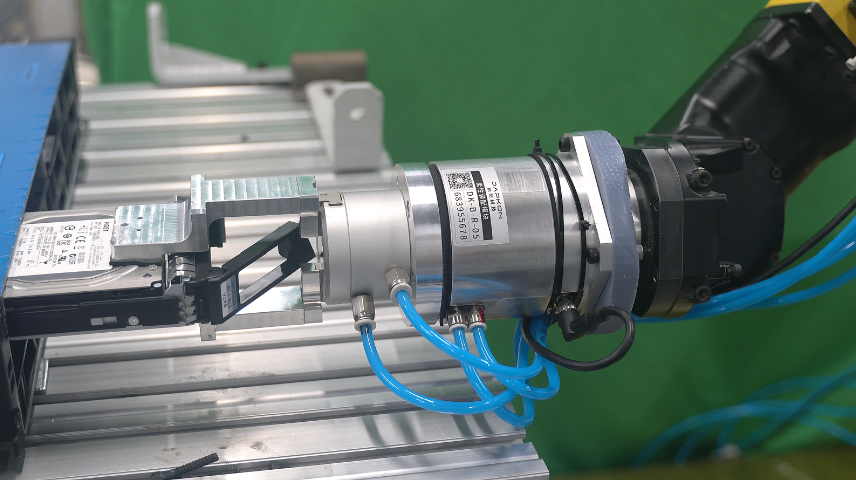
在现代工业生产中,轴孔装配是众多制造环节的关键步骤,而机器人力控技术的引入正为这一环节带来革新。达宽科技深耕机器人力控领域,其研发的力控装配方案,能够让机器人在轴孔装配过程中展现出更贴合实际需求的操作能力。传统的机器人装配往往依赖固定程序,面对轴孔之间微小的位置偏差或零件公差时,容易出现卡顿甚至损坏零件的情况。而力控装配通过内置的力传感器实时捕捉装配过程中的力反馈,让机器人能够根据实际接触情况灵活调整运动轨迹和力度,如同有经验的工人在操作时自然做出适应,从而顺利完成轴孔的精细对接,为企业的生产流程注入新的活力。青海机器人力控装配线



- 西藏机器人力控装配线 2025-12-04
- 重庆机器人力控装配流水线 2025-12-03
- 青海自动化装配流水线 2025-12-03
- 天津协作机器人装配解决方案 2025-12-03
- 青海机器人力控装配线 2025-12-03
- 宁夏机器人力控装配方案 2025-12-03
- 西藏协作机器人装配方案 2025-12-02
- 海南工业机器人力控方案 2025-12-02



- 01 现代化产教融合一般多少钱
- 02 德阳综合金蝶KIS云
- 03 江西结构三维数字化建模定制
- 04 广东三维数字化建模哪家公司好
- 05 重庆物业管理系统均价
- 06 绍兴品牌外贸独立站系统
- 07 滁州数字化广告投流投放
- 08 常州看护机器人研发
- 09 湖北机器人柔性力控装配方案
- 10 康巴什区科创电子AISaaS智能营销云平台真实点评