海南桃子智能采摘机器人公司
关键词: 海南桃子智能采摘机器人公司 智能采摘机器人

 2025.12.05
2025.12.05
文章来源:
可根据果实生长高度自动调节机械臂升降。智能采摘机器人的机械臂升降系统集成了激光测距传感器、倾角传感器和伺服电机驱动装置。激光测距传感器实时扫描果实与机械臂末端的垂直距离,当检测到果实生长位置变化时,将数据传输至控制系统。控制系统结合预先设定的果实高度范围,通过伺服电机精确调节机械臂各关节的角度,实现机械臂的自动升降。在柑橘园中,不同树龄的柑橘树果实生长高度差异较大,从 1 米到 3 米不等,机器人可在 0.5 秒内完成机械臂高度的调整,确保末端执行器始终处于采摘位置。此外,该系统还具备防碰撞功能,当机械臂在升降过程中检测到障碍物时,会立即停止运动并重新规划路径,避免损坏机械臂和果实。通过自动调节机械臂升降,智能采摘机器人能够适应不同高度的果实采摘需求,提高作业的灵活性和效率。熙岳智能智能采摘机器人的维护成本较低,为农户长期使用提供了经济保障。海南桃子智能采摘机器人公司
智能采摘机器人
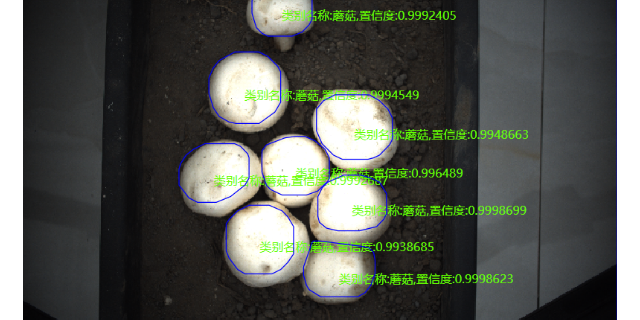
番茄采摘机器人的“大脑”与“眼睛”,是其更为关键的视觉识别与决策系统。这套系统通常由高分辨率RGB相机、深度传感器(如激光雷达或立体视觉摄像头)以及近红外光谱仪等多源传感器构成。它面临的挑战极为复杂:必须在枝叶缠绕、光影多变的环境中,准确区分红色的成熟番茄、绿色的未熟果、黄色的花朵以及茎叶;同时,还要判断果实的朝向、被遮挡的程度,甚至评估其表面的瑕疵或病害。通过先进的机器学习算法,尤其是深度学习卷积神经网络(CNN),系统经过海量标注图像的训练,获得了接近甚至超越人眼的识别精度。它不仅识别“是什么”,更通过三维点云建模判断“在哪里”和“如何摘”。这套系统每秒能处理数十次扫描,将果实的位置、成熟度坐标实时发送给控制中枢,是机器人实现精细作业的先决条件。上海果实智能采摘机器人品牌依托熙岳智能的技术,采摘机器人可以准确判断果实的大小、颜色、形状等特征。

展望未来,番茄采摘机器人不会止步于单一的采摘功能。它正演变为一个多功能的“农业机器人平台”。未来的机型可能集成了采摘、修剪、疏花、植保监测甚至精细授粉等多种作业模块,通过快速换装工具头实现“一机多用”。更进一步的愿景是“机器人群体协作”:多个不同类型的机器人在田间通过5G或网络实时通信,协同作业,由AI系统统一调度,形成高度自治的“无人农场”生产流。人与机器的关系也将从替代走向更深层次的协同共生。人类将更多负责战略规划、品种培育、系统维护和处置复杂异常,而将重复性、标准化的体力劳动与高频次的数据采集工作交给机器人。这不仅是生产工具的革新,更是对农业生产关系、劳动力结构和人类食物获取方式的深刻重塑。番茄采摘机器人,这个静默的田间伙伴,正悄然带我们走向一个更高效、更可持续、也更智能的农业新时代。
采用 AI 视觉算法,能快速定位目标果实的生长位置。AI 视觉算法赋予了智能采摘机器人强大的环境感知和目标识别能力。它基于深度学习的卷积神经网络(CNN),通过对海量果园图像数据的学习,能够准确区分果实、枝叶、背景等元素。当机器人进入果园作业时,摄像头采集到的图像信息会实时传输至算法模块,算法会对图像进行特征提取、目标检测和定位。在复杂的果园环境中,即便果实被茂密的枝叶遮挡,AI 视觉算法也能通过分析部分可见特征,结合空间几何关系,快速推算出果实的完整位置。此外,该算法还具备自适应能力,能随着作业环境的变化和数据积累不断优化,从而实现对目标果实位置的快速、定位,为后续的采摘动作提供准确引导。熙岳智能的智能采摘机器人凝聚了团队的智慧和心血,是科技创新的结晶。

其作业效率是人工采摘的 5 - 8 倍,大幅提升产能。在规模化种植的柑橘园中,人工采摘平均每人每天可收获 800 至 1000 公斤果实,而智能采摘机器人凭借高速机械臂与识别系统,每小时可完成 1200 至 1500 公斤的采摘量,单日作业量可达 8 至 10 吨,相当于 8 至 10 名熟练工人的工作量。在新疆的红枣种植基地,面对成熟期集中、采摘周期短的难题,10 台智能采摘机器人组成的作业团队,3 天内即可完成 500 亩红枣园的采摘任务,较传统人工采摘提前 20 天完成,有效避免因成熟过度导致的果实脱落损失。此外,机器人可 24 小时不间断作业,配合自动分拣系统,形成采摘、分拣、装箱一体化流程,进一步压缩生产周期,助力果园实现产能翻倍。熙岳智能研发团队不断优化机器人算法,让采摘机器人的决策更加智能。上海多功能智能采摘机器人按需定制
熙岳智能投入大量研发资源,不断优化智能采摘机器人的机械臂灵活性,提升采摘效率。海南桃子智能采摘机器人公司
柑橘采摘是劳动密集型产业的典型**。柑橘采摘机器人通常采用“摇撼-收集”或“选择性采摘”两种模式。前者通过振动树干使果实脱落,下方有伞状收集装置承接;后者则更为精密,使用3D视觉定位每个果实,计算比较好抓取路径。机器人手臂配备的旋转夹持器可以巧妙地拧下果子,真空吸盘则能无损转移果实。在以色列、西班牙等柑橘出口大国,这类机器人能24小时不间断工作,克服了人工采摘的时效限制和劳动力短缺问题。它们还能集成重量、色泽和表面瑕疵检测功能,实现采摘、初选一体化。对于果农而言,一次性投入虽然较高,但长期来看降低了人力成本和管理复杂度。海南桃子智能采摘机器人公司




- 江苏电池定制机器视觉检测服务趋势 2025-12-04
- 山东铅板定制机器视觉检测服务供应商 2025-12-04
- 吉林电池片阵列排布定制机器视觉检测服务供应商 2025-12-04
- 广东电池定制机器视觉检测服务性能 2025-12-04
- 广东压装机定制机器视觉检测服务 2025-12-04
- 电池片阵列排布定制机器视觉检测服务公司 2025-12-04
- 江西压装机定制机器视觉检测服务按需定制 2025-12-04
- 河南电池片阵列排布定制机器视觉检测服务案例 2025-12-03





- 01 小体积激光功率测试仪批发
- 02 安徽5吨/小时种子加工厂家
- 03 热蒸发真空镀膜设备价格
- 04 济南智能平开门别墅电梯大概多少钱
- 05 好的糖分检测设备厂家直销
- 06 实用型变压器局部放电故障模拟仿真试验设备有哪些
- 07 雅安千贝回水器安装说明
- 08 T型三通接头几分
- 09 山西中液智能线缆卷盘品质厂家
- 10 AI语音切换磁悬浮袋装线性价比高