高性能TOYO机器人小体积模组
关键词: 高性能TOYO机器人小体积模组 TOYO机器人

 2025.12.18
2025.12.18
文章来源:
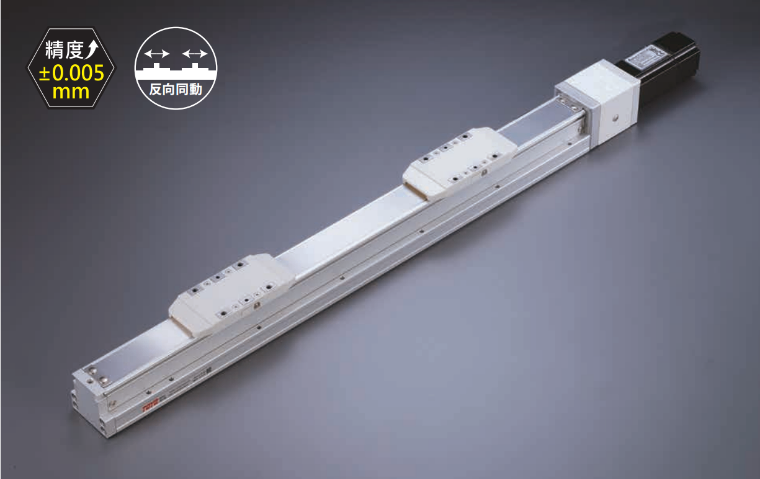
TOYO直线电机型号说明以LFT2-RHS2-N-4688-LS10-R-N-05H-LC100-A001为例LTF2:指的是本体型号RHS2:指的是本体固定方式及线槽出线方向。(有多种线槽与出线方式,具体参考TOYO直线电机型录,一般建议线槽自己配。)N:指的是动子数量(N:单动子;D:双动子)4688:指的是行程,不同动子的有效行程不一样。LS10:指的是编码器(标配是1μ光学尺或1μ磁性尺-TS10)R:指的是原点位置(L/R)N:指的是感应器数量05H:05表示驱动器的线长,H指的是霍尔线LC100:指的是驱动器(可配高创、三菱、松下、台达等)A001:特注码以科技为动力,TOYO机器人推动工业自动化发展。高性能TOYO机器人小体积模组

TOYO直线模组为光伏制造提供高精度运动控制解决方案。在硅片处理环节,其±0.005mm重复定位精度配合柔性缓冲机构,实现120μm超薄硅片的零损伤搬运,碎片率低至0.15%。针对电池串焊工艺,多轴同步控制技术保障0.02°联动精度,结合热变形补偿算法,有效解决焊带偏移问题,焊接良率提升至99.2%。在组件层压阶段,特殊合金导轨在85℃高温环境下仍保持±0.01mm/300mm的热稳定性,IP67级密封设计抵御EVA胶挥发物侵蚀,支持50,000小时免维护运行。该方案突破行业三大痛点:1)通过jerk≤0.5g/s的加速度控制,适配硅片薄片化趋势;2)6m超长模组实现132片大尺寸组件±0.1mm拼接精度;3)内置振动传感器预判维护需求,降低设备停机60%。实证显示:在10GW级光伏产线中提升人均产出65.7%,层压良品率达98.9%,年维护成本下降62.7%,为HJT/TOPCon等先进技术量产提供运动保障。多轴模组系列TOYO机器人直线电机TOYO直线电机性能好。

TOYO电动缸使用案例介绍多工件移载装置:将三支小型电动缸固定于电动滑台上,可同时对多个工件物进行移载,增加生产效率。使用规格:CGTH/DGTH零件外观检测装置:搭配视觉,可进行外观检测。使用规格:CGTH/DGTH对位装置:搭配传送带,使用小型电动缸,对工件物进行对位整列,推力可控制,改善使用气压缸推力不当而伤害工件的状况。使用规格:DMG。电子零件搬送装置:当夹持工件属于脆弱材料如电子零件,可使用电动夹爪扭力模式避免将工件物夹伤损坏。使用规格:CGTH/CHZ/CHB
电动缸凭借±0.01mm重复定位精度及可编程运动控制,成为高精度自动化执行元件。在工业机器人领域,其作为第七轴关节实现±0.05mm拾放精度,同步控制焊接头轨迹(0.1mm路径精度)与涂装流量(±2%波动)。智能物流系统中支持1.5m/s高速堆垛(承载800kg)及0.3s/件的动态分拣。自动化产线应用包括:精密压装(压力控制±5N,用于电机轴承过盈装配)扭矩拧紧(转角精度±0.1°,适用于电池包封装)组件安装(重复定位±0.02mm)测试环节覆盖:200万次循环耐久测试(家电按键)5kN压力测试(汽车铰链)0.01N微力检测(触控屏)先进的自动化设备,TOYO机器人带领行业发展。

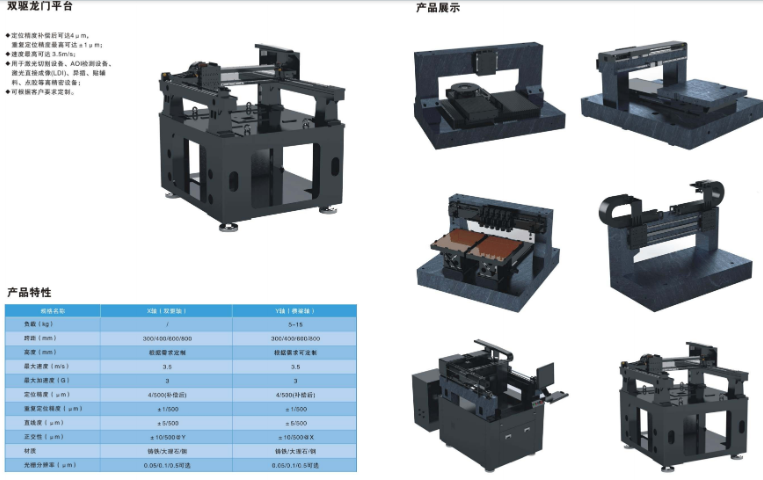
TOYO电控产品分为:气浮平台、直线电机、电动缸、电夹爪。气浮平台,通常指的是一种利用气体(通常是空气)的浮力来支撑并移动重物的技术平台。这种技术可以应用于多种场合,以下是一些气浮平台的主要应用和特点:在精密加工领域,如半导体制造,气浮平台可以提供极高的精度和平稳性,用于支撑和移动精密设备。特点:1、低摩擦:气浮平台可以极大地减少摩擦,从而减少能量损耗,提高运动精度。2、高稳定性:通过精确控制气体的压力和流量,气浮平台可以保持很高的稳定性。3、无污染:由于减少了机械接触,气浮平台在运行过程中产生的污染较少。4、维护简单:相对于传统的机械轴承或滚轮,气浮平台减少了机械磨损,因此维护更为简单。气浮平台通常包括以下几个部分:1.气浮垫:产生气浮力的主要部分,通常是一个有许多小孔的平面,气体从这些小孔中喷出,在平台与支撑面之间形成一层气膜。2.供气系统:包括气源、调节阀、管道等,用于向气浮垫供应稳定且压力可控的气体。3.控制系统:用于调节气体的压力和流量,以控制气浮平台的运动和稳定性。气浮平台是实现高精度、低摩擦运动的有效手段,随着技术的发展,其应用领域也在不断扩大。高效能的TOYO机器人,提升企业竞争力。光伏行业TOYO机器人滑台
高效作业的TOYO机器人,为企业发展增添动力。高性能TOYO机器人小体积模组
TC100 驱动器特点
集成化配置与监控软件 :
必须搭配软件 TOYO-Single 使用。
软件功能涵盖:
轴运动控制
参数修改与设定
位置点设置
实时信号与数据监控
智能原点回归功能:
无需外接原点传感器。
通过实时扭矩检测判断机械原点位置。
到达原点后自动输出回原完成信号。
行程保护与限位:可通过软件设置行程软限位。触发软限位时产生限位报警。
注意: 软限位报警无法区分正/负方向限位。
输入/输出 (I/O) 配置:
数字输入点: 14个
数字输出点: 10个
接线方式: 只支持 NPN 型信号接口。
位置保持与编码器特性:采用增量式编码器。断电后位置信息丢失。每次上电重启后必须执行回原点操作以建立参考位置。
扭矩到达控制:支持扭矩控制模式。当动作过程中达到预设扭矩值时,即判定当前动作完成。
脉冲控制方式与兼容性:只支持差分信号 (Line Driver) 脉冲控制方式。重要兼容性说明: 如果上位控制器(如PLC)只提供集电极开路 (Open Collector) 脉冲输出,需额外选配 TOYO 集电极转差分信号转接器方可连接使用。 高性能TOYO机器人小体积模组



- 高性能TOYO模组精品模组 2025-12-17
- 锂电TOYO模组集中注油 2025-12-17
- 東佑达TOYO机器人代理商 2025-12-17
- 稳定TOYO模组铝型材模组 2025-12-17
- 高速TOYO机器人定位平台 2025-12-17
- 3C行业TOYO模组ISO45001 2025-12-17
- 半导体行业TOYO机器人滑台 2025-12-16
- 标准TOYO机器人厂家 2025-12-16




- 01 浙江半导体真空管道定制
- 02 Clavis皮带张力仪 维修
- 03 河南防爆壁挂式空调适用于电力房
- 04 吉林双通道绝缘套管上漆生产线
- 05 贵州导热油水温机哪家好
- 06 小型minimo诚信互利
- 07 重庆炼钢罗茨真空机组
- 08 四川铅板瑕疵检测系统供应商
- 09 河南自动化变频器维修产业
- 10 嘉兴导热油炉价钱