天津压装机瑕疵检测系统用途
关键词: 天津压装机瑕疵检测系统用途 瑕疵检测系统

 2026.02.28
2026.02.28
文章来源:
深度学习,尤其是卷积神经网络,彻底改变了瑕疵检测的范式。与传统依赖手工特征的方法不同,深度学习能够从海量数据中自动学习瑕疵的深层、抽象特征,对复杂、不规则的缺陷(如细微裂纹、模糊的污损)具有更强的识别能力。突破体现在几个方面:首先,少样本学习(Few-shot Learning)和迁移学习技术,能够在标注样本有限的情况下快速构建有效模型,降低了数据准备成本。其次,生成对抗网络(GAN)被用于生成难以获取的瑕疵样本,或构建异常检测模型——学习正常样本的特征,任何偏离此特征的区域即被判定为异常,这对未知瑕疵的发现具有潜力。再次,视觉Transformer架构的引入,通过自注意力机制更好地捕捉图像的全局上下文信息,提升了在复杂背景下的检测精度。然而,深度学习仍有局限:其“黑箱”特性导致决策过程难以解释,在可靠性要求极高的领域(如航空航天)应用受阻;模型性能严重依赖训练数据的质量和代表性,数据偏差会导致泛化能力不足;此外,复杂模型需要巨大的计算资源,可能影响实时性。因此,当前最佳实践往往是深度学习与传统机器视觉方法的融合,以兼顾性能与可靠性。多光谱成像能揭示可见光以外的缺陷信息。天津压装机瑕疵检测系统用途

许多瑕疵不仅体现在表面纹理或颜色上,更表现为几何尺寸的偏差或三维形状的异常。2D视觉在测量高度、深度、平面度、体积等方面存在局限,而3D视觉技术提供了解决方案。主流的3D成像技术包括:1)激光三角测量:通过激光线或点阵投影到物体表面,相机从另一角度观察激光线的变形,计算出高度信息,适用于轮廓测量和较大物体的表面形貌扫描。2)结构光(如条纹投影、格雷码):向物体投射编码的光图案,通过图案变形解算出完整的三维点云,速度快、精度高,常用于复杂形状的在线检测。3)立体视觉:模仿人眼,用两个相机从不同视角拍摄,通过匹配对应点计算深度。4)飞行时间法(ToF):测量光脉冲的往返时间得到距离。3D检测系统可以精确测量零件的关键尺寸(如长宽高、孔径、间距)、平面度、真圆度、共面性、翘曲变形等,并据此判断是否为缺陷。例如,检测电子连接器的引脚共面度、汽车零部件的装配间隙、焊接后的焊缝凸起高度(焊瘤)或凹陷。3D点云数据的处理算法(如点云配准、分割、特征提取)相比2D图像处理更为复杂,但能提供无可替代的几何信息维度。连云港铅酸电池瑕疵检测系统案例卷积神经网络(CNN)是当前主流的检测架构之一。

在深度学习普及之前,瑕疵检测主要依赖于一系列经典的数字图像处理算法。这些算法通常遵循一个标准的处理流程:图像预处理、特征提取与分类决策。预处理包括灰度化、滤波(如高斯滤波去噪、中值滤波去椒盐噪声)、图像增强(如直方图均衡化以提高对比度)等,旨在改善图像质量。特征提取是关键步骤,旨在将图像转换为可量化的特征向量,常用方法包括:基于形态学的操作(如开运算、闭运算)检测颗粒或孔洞;边缘检测算子(如Sobel、Canny)寻找划痕或边界缺损;纹理分析算法(如灰度共生矩阵GLCM、局部二值模式LBP)鉴别织物或金属表面的纹理异常;基于阈值的分割(如全局阈值、自适应阈值)分离前景与背景;以及斑点分析、模板匹配(归一化互相关)等。通过设定规则或简单的分类器(如支持向量机SVM)对提取的特征进行判断。这些传统方法在场景可控、光照稳定、瑕疵特征明显且与背景差异大的应用中表现良好,且具有算法透明、可预测、计算资源要求相对较低的优点。然而,其局限性也显而易见:严重依赖经验进行特征工程,算法泛化能力差,对光照变化、产品位置轻微偏移、复杂背景或新型未知瑕疵的鲁棒性不足,难以应对日益增长的检测复杂性需求。
全自动检测并非在所有场景下都是比较好解。人机协作正在催生新型的、效率更高的质检模式。一种常见模式是“机器筛查,人工复判”:系统高速筛选出所有可疑品(包括确定瑕疵品和不确定品),再由人工集中对可疑品进行**终判定。这极大地减轻了人工长时间目检的负担,使其精力集中于决策环节,整体效率和准确性得以提升。另一种模式是增强现实辅助质检:工人佩戴AR眼镜,摄像头捕捉产品图像,系统实时分析并在视野中高亮标注出潜在瑕疵区域,指导工人快速定位和判断。这种方式结合了机器的稳定性和人类的灵活性,适用于小批量、多品种、工艺复杂的产品。在这种协作模式下,系统设计需格外注重人机交互界面(HMI)的友好性,复判结果应能便捷地反馈给系统,用于模型的自学习和优化。这种人机共存的质检体系,不仅在技术上更易实现,在经济上也更具灵活性,是当前许多企业从纯人工向全自动过渡的理想路径。机器学习算法能自动识别划痕、凹坑等常见缺陷。

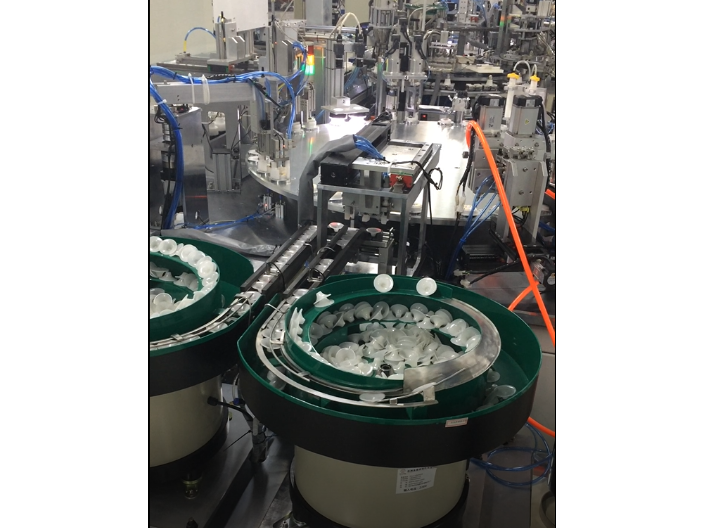
在半导体、PCB(印刷电路板)、显示屏等精密电子制造领域,瑕疵检测系统扮演着“工艺守护神”的角色。以OLED显示屏为例,其生产工艺复杂,可能出现的瑕疵包括亮点、暗点、Mura(辉度不均)、划伤、异物、线路短路/断路等,尺寸微小至微米级。系统采用超高分辨率相机,在多种光源模式下进行多道扫描,通过深度学习模型精细区分致命缺陷与可容忍的工艺波动。在半导体晶圆检测中,系统甚至需要检测纳米级的颗粒污染和图形缺陷。这些应用对系统的稳定性、重复精度和误判率(尤其是过杀率)提出了更高的要求,因为任何漏检或误判都可能导致巨额损失。先进的系统会结合3D形貌检测技术,测量刻蚀深度、焊点高度等,实现从2D到3D的质量控制,从而保障芯片的良率和可靠性,是推动摩尔定律持续前行的重要支撑。基于规则的算法适用于特征明确的缺陷识别。安徽冲网瑕疵检测系统私人定做
金属表面的腐蚀、裂纹可通过特定光谱成像发现。天津压装机瑕疵检测系统用途
许多工业瑕疵*凭可见光成像难以发现,或者需要获取物体内部或材料成分的信息。因此,融合多种传感模态的检测系统应运而生。例如,X射线成像能够穿透物体,清晰显示内部结构缺陷,如铸件的气孔、缩松,电子元件的焊点虚焊、BGA球栅阵列的桥接等。红外热成像通过检测物体表面的温度分布差异,可以识别材料内部的分层、脱胶,或电路板上的过热元件。超声波检测利用高频声波在材料中传播遇到缺陷产生反射的原理,常用于检测复合材料的分层、金属内部的裂纹等。高光谱成像则捕获从可见光到红外光多个窄波段的图像,形成“图谱合一”的数据立方体,能够根据物质的光谱特征区分表面污染、成分不均等肉眼不可见的缺陷。多模态系统并非传感器的简单堆砌,其关键挑战在于信息融合:如何在数据层、特征层或决策层,将来自不同物理原理、不同分辨率、不同时空基准的信息有效整合,产生比单一模态更可靠、更齐全的检测结果。这需要先进的传感器同步技术、复杂的标定算法以及创新的融合模型设计。天津压装机瑕疵检测系统用途



- 安徽篦冷机工况瑕疵检测系统制造价格 2026-03-01
- 天津定制机器视觉检测服务 2026-03-01
- 四川零件瑕疵检测系统私人定做 2026-03-01
- 吉林定制机器视觉检测服务价格低 2026-03-01
- 浙江冲网定制机器视觉检测服务案例 2026-03-01
- 北京榨菜包定制机器视觉检测服务价格低 2026-03-01
- 广东定制机器视觉检测服务性能 2026-03-01
- 天津压装机瑕疵检测系统用途 2026-02-28



- 01 全桥式刮泥机制造厂
- 02 光伏行业TOYO机器人直线模组
- 03 南昌立式离心机定制
- 04 盐城数控液压主轴市场报价
- 05 徐州半导体管道供应
- 06 广东工业自助发衣机怎么用
- 07 EPS欧式装饰构件设备
- 08 安徽国内斗杆重量
- 09 陕西镜面研磨机定制
- 10 江西高精度防爆液压机