北京立体仓库3D相机避障
关键词: 北京立体仓库3D相机避障 3D相机

 2026.04.30
2026.04.30
文章来源:
公园、景区等户外场景保洁面临区域广、人流大、死角多、动态垃圾难清理等问题,传统清扫依赖人工,效率低下。sparkbot 3D TOF相机赋能户外清扫机器人,选用DT950型号,120°超广视角可多方面覆盖作业区域,准确识别落叶、纸屑等各类垃圾,同时规避行人、座椅等障碍物。5米内≤1cm的测距精度确保清扫无死角,配合路径规划算法,可根据垃圾密度动态优化路线,空驶率降低至5%,单次充电可连续作业6-8小时,实现全天候无人值守保洁,零排放、低噪音,契合低碳生态理念,适配公园、景区、市政道路等场景。sparkbot的aura灵光系列产品,采用i tof测量学原理设计,可以提供标准化的硬件模块,也。北京立体仓库3D相机避障
场景:火灾现场、地震废墟,存在燃烧物、倒塌墙体、碎石、积水等障碍物,光线昏暗、烟雾浓厚,环境复杂且危险,需进入现场探查、救援,避免碰撞危险物体。技术说明:配备sparkbot 3D激光雷达与3D ToF相机,融合3D ToF与dToF数据,突破单一传感器在烟雾、昏暗环境下的局限,实现远距离倒塌墙体、燃烧物的高精度探测与近距离碎石、积水的广域覆盖。融合多源传感器数据,精确识别障碍物类别、地面安全性及可通行区域,构建灾害现场三维环境模型,优化系统延迟,应对墙体二次坍塌、火焰蔓延等动态场景,智能适应昏暗、烟雾环境与复杂地形,保障救援机器人安全进入现场,辅助消防救援。长沙AGV3D相机统计sparkbot团队的DT950、DT950Pro 3D视觉相机成功将低速无人配送车广泛应用于小区。

刑侦现场勘查领域已进入全链条数字化阶段,其勘查方案集成3D激光雷达扫描、3D ToF技术、AI物证识别与数字化存档技术,实现“现场采集-三维复刻-物证分析-档案管理”的闭环流程。勘查人员使用便携式3D激光雷达ToF扫描仪,环绕案发现场行走一圈,约6分钟即可完成数据采集,依托ToF技术的高精度优势,同步获取现场全景点云与高清影像,准确还原现场布局、物证位置等细节,避免现场破坏。系统通过AI智能识别,标注物证位置与尺寸,自动生成标准化勘查图纸,支持三维点云、360°全景等多模式展示,实现案发现场全息化、结构化还原,形成完整数字化证据链,提升勘查效率与证据的规范性、可追溯性,助力案件侦破。
在智能化浪潮席卷全球的当下,智能移动机器人正从实验室走向产业前端,成为工业巡检、抢险救灾、公共服务等领域的重要力量。其中,具备复杂地形适应能力的多足机器人因能突破轮式、履带式机器人的场景限制,成为行业研发的焦点。然而,传统感知设备在复杂环境下的 “视觉盲区”“抗干扰能力弱” 等问题,始终制约着机器人的自主决策效率。半球形3D激光雷达与 6 足机器狗的结合,为移动机器人的空间智能感知开辟了新路径。作为面向智能移动机器人市场的创新产品,半球形3D激光雷达 以四大主要优势重新定义激光雷达的应用边界。360° 全向超大视场角是其标志性突破 —— 将水平视场角提升至 360° 的同时,垂直视场角达消除了盲区的存在,能为机器人提供无死角的三维环境数据。轻巧的机身设计,使其可嵌入式安装在 6 足机器狗的腿部或躯干,完美解决近距障碍物漏检问题。针对多设备协同场景,主动抗串扰技术确保多台激光雷达同时工作时信号互不干扰,这对仓储、机房等密集部署场景至关重要。此外,抗室外强光性能让机器狗在烈日与昏暗环境中无缝切换,90 米的探测距离(@80% 反射率)进一步扩展了作业半径。3D激光雷达和的3D tof 相机的应用不仅提高了地铁屏蔽门的防夹性能,还增强了整个地铁系统的安全。
有机蔬菜种植中,人工除草效率低、化学除草污染重,传统机械除草易伤苗,大棚内更是“无机可用”。sparkbot 3D TOF相机为除草机器人搭载感知系统,选用DT950pro型号,40米测距能力适配大棚与露天农田场景,1080P视觉模块结合AI算法,快速区分作物与杂草,识别率达95%以上。动态遮挡下定位误差<5cm,将激光发射点误差控制在毫米级,准确避开作物苗,实现“识别—定位—激光清理”一体化作业,1秒即可杀灭杂草,纯物理操作无农药残留,适配菠菜、茼蒿等撒播类蔬菜,大幅降低人工成本,助力绿色农业发展。sparkbot团队推出的智能3D检测系统,有效弥补了单一传感器信息不足的弊端,进一步提升了托盘定。天津托盘3D相机导航
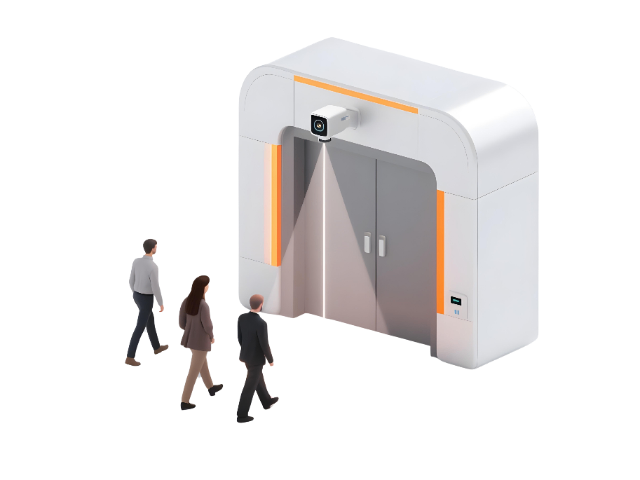
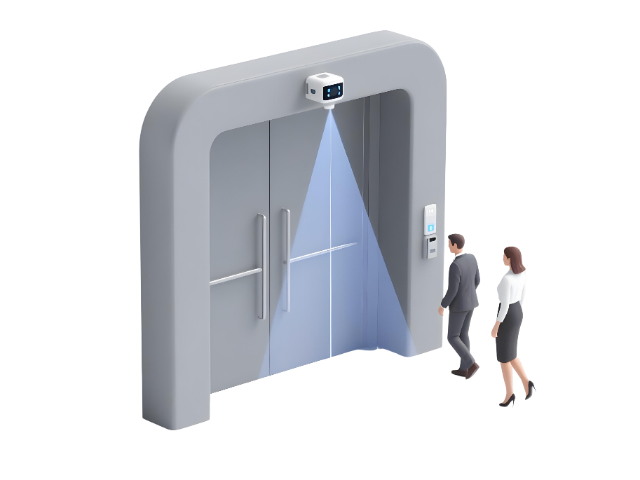
3D视觉相机在电梯出入口安防中可实现精细防护。北京立体仓库3D相机避障
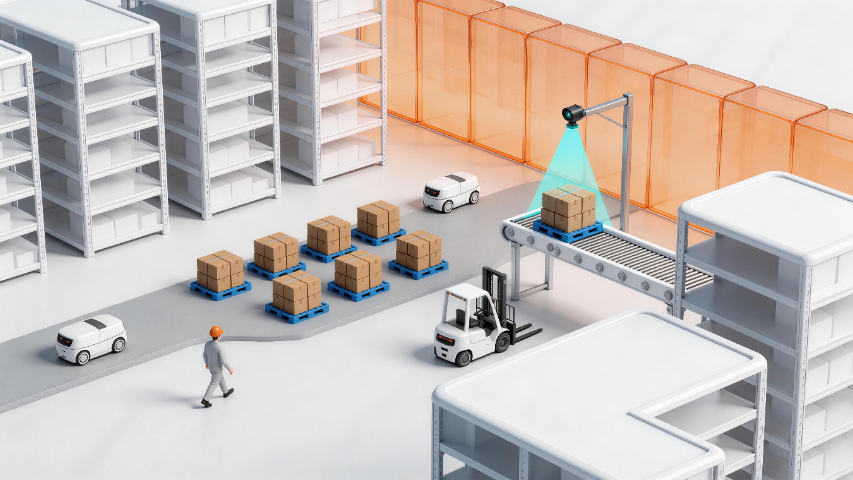
在机器人仓储库位管理场景使用过程中存在以下问题:纯RGB相机校验方法单一,存在误判和信息缺失风险采用RGB相机进行库位状态判定时,存在几个弊端:一是通过深度学习对目标区域进行检测时,一旦有训练集之外的物体进入库位时,很可能会造成误检,给出错误的库位判定信息;二是针对有货物堆叠需求的库位判断时,RGB相机给出的信息由于缺少货物高度信息,导致难以安排堆叠任务。另外,有部分仓库采用超广角鱼眼相机进行库位状态判定,边缘畸变大,对模型训练与预测准确性有较大挑战,且需额外增加带GPU的服务器成本。通过采用3D视觉相机技术,在则可以解决此类问题。北京立体仓库3D相机避障
杭州星火博特科技有限公司在同行业领域中,一直处在一个不断锐意进取,不断制造创新的市场高度。多年以来致力于发展富有创新价值理念的产品标准,在浙江省等地区的电子传感器领域中始终保持良好的商业口碑。成绩让我们喜悦,但不会让我们止步,残酷的市场磨炼了我们坚强不屈的意志,和谐温馨的工作环境,富有营养的公司土壤滋养着我们不断开拓创新,勇于进取的无限潜力。杭州星火博特科技供应携手大家一起走向共同辉煌的未来,回首过去,我们不会因为取得了一点点成绩而沾沾自喜,相反的是面对竞争越来越激烈的市场氛围,我们更要明确自己的不足,做好迎接新挑战的准备,要不畏困难,激流勇进,以一个更崭新的精神面貌迎接大家,共同走向辉煌回来!



- 成都托盘TOF相机定位 2026-04-27
- 佛山AMR3D激光雷达定位 2026-04-27
- 天津货架3D相机测量 2026-04-27
- 青岛无人机3D激光雷达导航 2026-04-27
- 无人机3D相机模块 2026-04-26
- 北京体积TOF相机建图 2026-04-26
- 合肥割草机3D激光雷达建图 2026-04-26
- 成都3D激光雷达打印 2026-04-26




- 01 肖特基二极管坏了有什么现象
- 02 XB6091I2S电源管理IC上海芯龙
- 03 江苏清洁电器控制板优惠
- 04 浙江热敏电阻探头
- 05 工业无线传输光模块生产商
- 06 AD625KNZ
- 07 天津低压差过压保护芯片
- 08 淄博恒压晶闸管调压模块生产厂家
- 09 揭阳家电金属柄编码器价格
- 10 江苏高温硅电容参数