武汉3D相机扫描
关键词: 武汉3D相机扫描 3D相机

 2026.05.05
2026.05.05
文章来源:
3D激光雷达在室内智能巡检领域实现多项项目落地。凭借其360°全向超大视场角、垂直无盲区以及主动抗串扰等重要技术优势,该3D激光雷达雷达成功推动移动机器人感知能力从2D迈向3D,明显提升了室内巡检的安全性、效率与智能化水平,为数据中心、工业园区厂房、大型仓储库房等关键室内场景的运维升级提供了创新解决方案。在典型的大型数据中心巡检应用中,传统搭载单线激光雷达的巡检机器人具备平面2D感知能力,面对机柜间细小障碍物、地面突出管线等复杂环境时,常存在感知盲区,且往往需要预先进行环境改造,导致部署周期长、运维成本居高不下。而搭载3D激光雷达的新一代巡检机器人,则有效解决了上述痛点。3D激光雷达采用固态激光雷达技术,具备360°水平视场角与大角度、无盲区的垂直视场角的立体覆盖能力,实现了真正意义上的无盲区感知。在机柜密布的数据中心环境中,机器人可准确采集三维空间内各类环境特征,完成高精度建图与实时定位,无需对现有布局进行任何调整,部署效率提升超过60%。同时,该雷达支持通过时间积分提升角分辨率,能准确识别螺丝、线缆接头等细小物体,有力规避碰撞风险,确保巡检作业安全可靠。3D激光雷达和的3D tof 相机的应用不仅提高了地铁屏蔽门的防夹性能,还增强了整个地铁系统的安全。武汉3D相机扫描
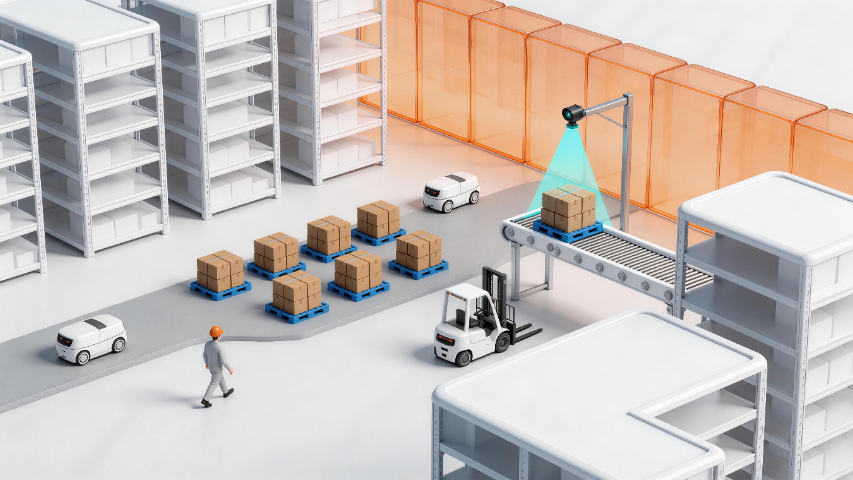
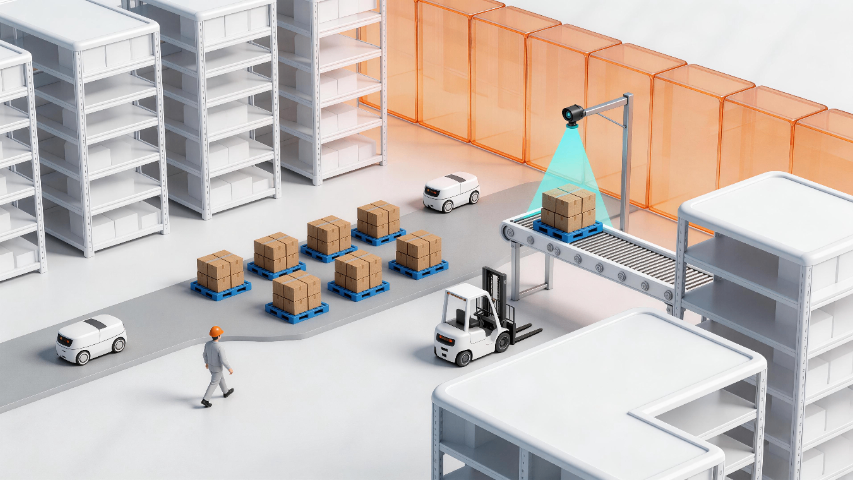
3D视觉技术较广泛应用于无人叉车与货运机器人,在物流仓储、工业自动化等领域发挥重要作用。亚马逊Kiva机器人系统是典型案例,其搭载的3D视觉系统可实时扫描货架货物,生成高精度三维地图,实现货物精确定位与搬运,配合计算机集群跟踪和资源分配算法,能识别不同包裹并调整搬运方式,大幅提升仓储配送效率,减少人工干预。 波士顿动力Spot机器人则展现了其在工业自动化中的价值,多种3D视觉传感器赋予其高精度环境感知能力,可在复杂工业环境自主移动,执行巡检、数据采集等任务,在狭小、动态空间灵活应对,提升生产安全性与效率。在智能物流领域,杭州星火博特科技借助3D视觉技术,推出智能避障等解决方案,让移动机器人搭载3D深度相机和3D激光雷达识别各类障碍物,规避激光雷达盲区风险,优化物流企业工作流程。武汉3D相机扫描3D激光雷达安全监测方案,有效屏蔽门即将关闭的瞬间,激光雷达迅速检测危险信号及时阻止了屏蔽门的关。

随着深度学习和计算机视觉技术的不断进步,3D激光雷达导航在未来可能会得到更较广泛的应用和进一步的优化,为无人叉车等领域带来更多创新和突破。比如,3D激光雷达导航技术在各种环境下都具有较强的适用性,不受地形、光照等因素的限制,可以灵活应对不同的场景和任务需求。而激光导航可能受到地形复杂度和遮挡物的影响,需要在特定的环境下进行精确地地图构建和路径规划。机器视觉系统还可以通过不断的学习和优化,提高自身的检测精度和识别率。以人工智能驱动的机器视觉在内部物流管理方面具有多重优势,从提高准确性和效率到降低成本和增强安全性,这些技术的进步为现代物流领域带来了革新性的改变。
建筑巡检机器人搭载3D激光雷达,助力大型公共建筑施工与运维阶段的准确巡检。其360°全向扫描能力,可捕捉建筑结构、施工设备、脚手架等细节,结合改进型SLAM算法,减少点云漂移与Z轴误差,提升定位精度。≤1cm的测距精度,能准确检测建筑构件尺寸、施工偏差,及时发现结构隐患。高达100万点/秒的点云速率,可快速构建建筑3D数字模型,实现施工进度可视化管理。机器人可自主穿梭于施工场地,规避施工机械、作业人员等障碍物,替代人工完成高空、危险区域巡检,降低施工安全风险,提升巡检效率。sparkbot团队专为移动机器人、低速无人车、无人叉车、无人机、割草机等设备提供稳定的远距离感知。
场景:大型商场大厅、走廊,人员密集且流动无序,存在展柜、指示牌、购物车、儿童推车等障碍物,光照明亮且随外界光线变化,空间开阔但障碍物分布杂乱。技术说明:搭载sparkbot 3D ToF相机,融合3D ToF与dToF数据,实现远距离展柜、指示牌的高精度探测与近距离购物车、行人的广域覆盖,突破单一传感器局限。构建多层级环境感知,准确识别障碍物类别,区分行人与固定障碍物,构建商场三维环境模型,深度优化系统延迟,面对行人突然变向、购物车切入等动态场景,实现毫秒级避障反应,智能适应商场明亮光照变化与地面材质差异,保障机器人在密集人群中灵活穿梭,完成导购服务。杭州星火博特3D视觉体积测量解决方案由高性能3D视觉相机、先进体积测量算法和灵活软件平台组成,保障。天津AGV3D相机雷达
3D视觉相机在电梯出入口安防中可实现精细防护。武汉3D相机扫描
在导航方面,3D视觉技术同样发挥着不可或缺的作用。通过实时获取周围环境的三维数据,机器人能够精确地定位自身在环境中的位置,并规划出到达目标点的较优路径。这种基于3D视觉的导航方式不仅可具有高度的灵活性和自主性,还能够有效应对各种动态变化的环境因素,如障碍物的移动、光照条件的变化等。移动机器人在执行导航任务时,可以利用3D视觉传感器不断感知周围环境的变化,并实时更新自身的位置信息。同时,结合预先设定的目标点和约束条件,机器人可以运用先进的路径规划算法,如AI算法、Dijkstra算法等,计算出一条从当前位置到目标点的较优路径。这条路径不仅可考虑了距离因素,还综合了安全性、可行性等多方面因素,确保机器人在导航过程中能够避开障碍物、顺利通过复杂地形。随着深度学习技术的不断发展,基于3D视觉的场景识别与导航功能得到了进一步的提升。通过结合深度学习算法,机器人可以从大量的三维数据中学习到更加丰富的特征表示和语义信息,从而提高场景识别的准确性和导航的智能性。例如,利用卷积神经网络(CNN)对三维图像进行特征提取和分类,可以帮助机器人更加准确地识别出场景中的不同物体;武汉3D相机扫描
杭州星火博特科技有限公司汇集了大量的优秀人才,集企业奇思,创经济奇迹,一群有梦想有朝气的团队不断在前进的道路上开创新天地,绘画新蓝图,在浙江省等地区的电子元器件中始终保持良好的信誉,信奉着“争取每一个客户不容易,失去每一个用户很简单”的服务理念,市场是企业的方向,质量是企业的生命,在公司有效方针的领导下,全体上下,团结一致,共同进退,把各方面工作做得更好,努力开创工作的新局面,公司的新高度,未来杭州星火博特科技供应和您一起奔向更美好的未来,即使现在有一点小小的成绩,也不足以骄傲,过去的种种都已成为昨日我们只有总结经验,才能继续上路,让我们一起点燃新的希望,放飞新的梦想!




- 佛山机械狗3D相机检测 2026-05-03
- 上海货架3D相机打印 2026-05-02
- 苏州移动机器人TOF相机 2026-05-02
- 上海AMR3D激光雷达建图 2026-05-02
- 深圳AMR3D激光雷达建图 2026-05-02
- 沈阳库位3D激光雷达厂家 2026-05-02
- 深圳无人机3D相机定位 2026-05-01
- 佛山人形机器人3D相机厂家 2026-05-01




- 01 保定贴片热敏电阻哪家专业
- 02 广东双面电路板净化器
- 03 福建塑料瞬干胶(快干胶)工厂直销
- 04 江西半导体封装铟片直销价
- 05 XBM3214JFG电源管理IC厂家
- 06 内蒙古SMT贴片加工厂家
- 07 安徽电池弹片五金冲压件厂家
- 08 扬州工控SMT贴片一站式
- 09 重庆10uH一体成型电感批发厂家
- 10 高性价比晶体振荡器参数