陕西机器人防护防撞传感器方案设计
关键词: 陕西机器人防护防撞传感器方案设计 传感器

 2026.06.15
2026.06.15
文章来源:
很多企业在引入智能安全设备时,比较大的顾虑就是调试复杂、维护困难。大德恒通防撞传感器配套“DDH智能防护系统1.0”上位机软件,界面清晰、操作直观。用户只需通过以太网连接传感器,即可在电脑上实时查看检测画面,并用鼠标直接在图像上绘制防护区域——支持矩形、圆形、多边形等多种形状,区域大小、位置、数量均可自由设定。每个检测区域还可**调节灵敏度,自由匹配I/O开关量输出。一套传感器可存储多个防护场景,适应同一设备在不同工位、不同工序下的安全需求,一键切换即可完成防护方案调整。这种“所见即所得”的调试方式,大幅降低了使用门槛,普通电气工程师或设备管理员经过简单培训即可**完成设置,真正实现了防撞传感器的易用性与普及性。适用于汽车工厂、3C电子等高危作业区域安全防护。陕西机器人防护防撞传感器方案设计
传感器
立体空间防护传感器在自动化设备中的物体检测与识别功能用于物料搬运场景。在立体仓库的巷道堆垛机中,传感器安装在载货平台上。堆垛机在货架之间移动存取货物,每个货位是否有货物需要被确认。传感器发射探测波束指向货位内部,根据反射信号判断货物存在与否。有货物时反射信号强度高,无货物时反射信号弱或没有反射。输出信号传送给仓库管理系统,用于更新库存记录。这种检测方式不需要接触货物,避免了机械损伤。在抓取和放置动作中,传感器识别货物的形状和位置。当机械手爪接近货物时,传感器测量货物表面与手爪之间的距离,距离达到抓取位置时发出信号,手爪闭合。放置货物时,传感器检测放置表面高度,确保手爪在适当位置打开。不同颜色和材质的货物对传感器的检测距离影响较小。黑色橡胶和白色塑料的检测结果差异在百分之五以内。安装时需调整传感器角度,使波束中心对准货物中部。中国香港机械臂伤人事故防护防撞传感器蜂鸣器与警示灯双警示,及时提醒人员远离危险区域。
立体空间防护传感器在协作机器人打磨工位中用于区分人体与工件。打磨机器人末端装有气动打磨头,工件固定在台面上。操作人员需要手持工件在打磨头上进行去毛刺作业。传感器安装在机器人底座上方1.2米高度处,向下倾斜15度角探测。传感器能够识别操作人员的手臂和工件之间的差异。手臂表面覆盖工作服,红外反射率较低。工件表面为金属或塑料,红外反射率较高。传感器接收回波强度时,根据反射率差异判断目标的类别。当检测到低反射率目标靠近打磨头时,机器人降低转速。当检测到高反射率目标靠近时,机器人保持正常转速。这种区别处理使操作人员可以安全地手持工件靠近打磨头,而手臂接触打磨头时机器人立即停止。传感器的识别算法在出厂时预置了多种材料的反射率参数。用户也可以自行录入新材料的反射率数据。传感器的探测频率为每秒20次,能够捕捉快速运动的手臂轨迹。安装底座上有角度刻度盘,方便调整探测角度并记录位置。
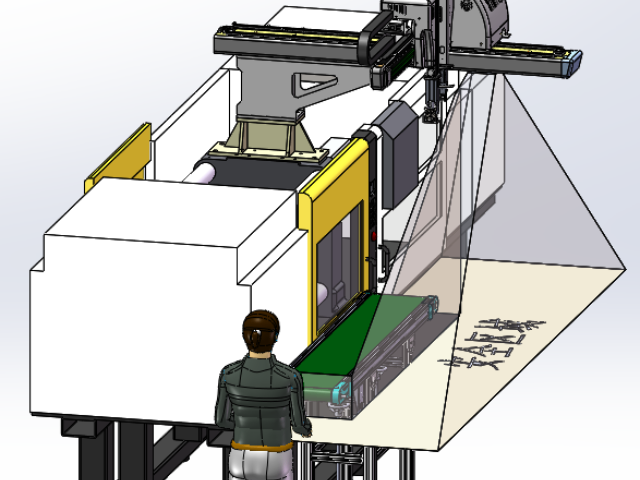
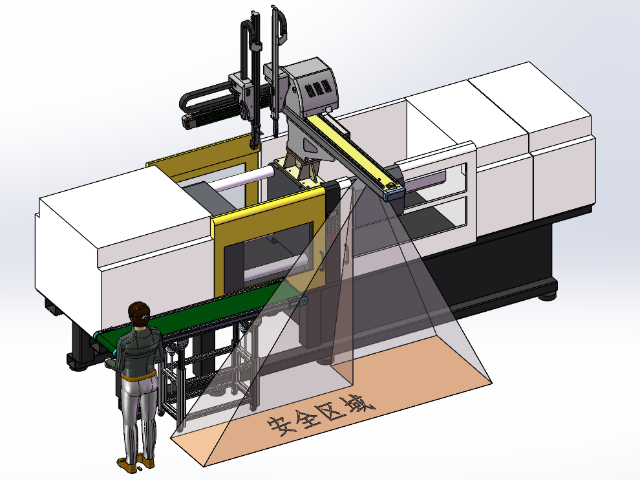
在自动化产线的升级改造中,立体空间防护传感器替代了传统的机械式围栏和光幕。机械式围栏占用地面空间,人员进出需要开门或翻越。光幕只能形成二维平面检测,存在探测盲区。立体空间传感器使用三维探测方式,波束覆盖一个立体锥形区域。区域内部的任何位置只要有目标进入都能被检测到。这种设计允许操作人员在一定范围内自由活动,只有在进入危险区域时设备才会响应。生产线布局调整时,传感器只需要重新设定监测区域参数,不需要移动物理位置。参数设定通过连接调试软件完成,每个传感器的监测形状可以是球形、长方体或自定义轮廓。在不同生产节拍下,传感器响应时间保持稳定。快速移动的设备选用响应时间小于20毫安的型号,慢速设备选用响应时间小于100毫安的型号。安装高度根据设备类型确定。地面移动设备安装高度在200至500毫米之间,空中悬挂设备安装高度在1000至2000毫米之间。入侵即报警,不分人与物,各方位覆盖危险区域。

立体空间防护传感器在电子元器件插件机中用于检测元件引脚是否插入电路板孔位。插件机将电子元件从编带中取出,插入电路板对应的孔位。传感器安装在插装头上方,在元件插入后检测引脚末端与电路板背面的距离。四个引脚全部穿过电路板时传感器测量到的距离较小,有引脚未穿过时距离较大。距离值超过设定阈值时判定为插入失败,插件机停止并将电路板标记为待修品。传感器采用同轴反射式光纤原理,发射光纤和接收光纤并排布置在同一探头内。光纤探头直径为2毫米,可安装在插装头的狭小空间内。光纤放大器主机距离探头3米,使用柔性光缆连接。放大器内部有红光LED光源和硅光电池接收器。检测距离通过放大器面板上的调节旋钮设定,检测范围0至5毫米。电路板材质为FR4玻璃纤维,背面有焊盘和导线。元件引脚材质为锡镀层铜线,反射率高于电路板。传感器根据反射光强度差异判断引脚是否存在。插入失败的元件引脚弯曲或未穿过,反射光强不足。放大器的响应速度为0.2毫秒,插件机插装速度为每秒2次。光纤探头前端安装不锈钢保护套管,套管长度10毫米,防止探头与电路板碰撞。维护人员每周检查光纤端面是否脏污,使用**清洁棒擦拭。大德恒通防撞传感器,让安全更智能,让生产更安心。天津人物区分传感器方案设计
入侵即报警,无论人、物进入防护区域均立即响应。陕西机器人防护防撞传感器方案设计
在冲压自动化生产线中,立体空间防护传感器被用于模具区域的安全防护。冲压机滑块上下往复运动,模具区域存在挤压风险。操作人员需要进入模具区域进行换模或清理废料时,传感器检测到人员存在,向冲压机控制系统发送禁止合模信号。冲压机曲轴角度锁定在安全位置,滑块保持在上死点。传感器也能检测模具内部是否有异物。冲压前传感器快速扫描模具型腔,如果型腔内有上一个冲次遗留的废料或工具,输出异常信号。冲压机无法启动,等待人工***异物。传感器的检测波束能够穿透少量油雾和冷却液飞沫。在冲压机高速运行时产生的振动环境中,传感器的安装底座使用橡胶减震垫。减震垫吸收高频振动能量,避免振动传递到传感器内部电路。供电线路与动力线路分开走线,保持200毫米以上的间隔距离。传感器输出信号线使用双绞屏蔽线,屏蔽层在控制器端接地。每班次开始前,操作人员使用测试棒验证传感器功能是否正常,测试棒插入检测区域时传感器应有输出信号变化。陕西机器人防护防撞传感器方案设计
深圳市大德恒通科技有限公司是一家有着先进的发展理念,先进的管理经验,在发展过程中不断完善自己,要求自己,不断创新,时刻准备着迎接更多挑战的活力公司,在广东省等地区的机械及行业设备中汇聚了大量的人脉以及**,在业界也收获了很多良好的评价,这些都源自于自身的努力和大家共同进步的结果,这些评价对我们而言是比较好的前进动力,也促使我们在以后的道路上保持奋发图强、一往无前的进取创新精神,努力把公司发展战略推向一个新高度,在全体员工共同努力之下,全力拼搏将共同深圳市大德恒通科技供应和您一起携手走向更好的未来,创造更有价值的产品,我们将以更好的状态,更认真的态度,更饱满的精力去创造,去拼搏,去努力,让我们一起更好更快的成长!




- 海南工业安全传感器代理价钱 2026-06-14
- 福建高精度检测传感器智能调节 2026-06-14
- 江西电子安全围栏防护传感器设备制造 2026-06-14
- 天津工业安全防护防撞传感器场景适配 2026-06-14
- 福建机械手安全防护传感器技术指导 2026-06-14
- 海南机器人失控传感器设备制造 2026-06-14
- 云南冲压防护防撞传感器方案设计 2026-06-13
- 天津机械手安全防护传感器可切换多场景防护区域 2026-06-13





- 01 连云港机床微量润滑厂家电话
- 02 安徽12V顶置式房车空调
- 03 北京龙门式涂胶机航空航天供应商审核
- 04 浙江独栋别墅电梯上门测量
- 05 广东半导体半封闭丝杆模组定制厂家
- 06 上海国产氛围灯检测校准技术支持
- 07 江苏离心铸造厂家报价
- 08 温州船舶制造智能焊接服务
- 09 宁波余热回收吸干机定制厂家
- 10 半自动砂芯机厂家供应