安徽AI防护防撞传感器方案设计
关键词: 安徽AI防护防撞传感器方案设计 传感器

 2026.06.30
2026.06.30
文章来源:
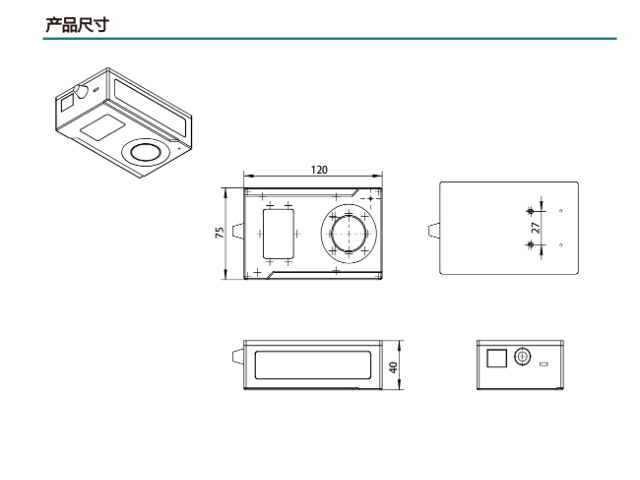
立体空间防护传感器在自动螺丝锁付机中用于检测螺丝是否到位。螺丝由振动盘排列后通过气管吹送到锁付头的夹爪位置。传感器安装在夹爪两侧,检测螺丝是否进入夹爪。螺丝到达时遮断传感器光路,输出到位信号。锁付头下降,电批旋转将螺丝拧入工件。若传感器未检测到螺丝,锁付头保持在上位,不执行下降动作。传感器采用对射式光纤放大器的形式,光纤探头直径1毫米,安装在夹爪的微小空间内。光纤放大器主机安装在控制柜内,通过光缆连接探头。光缆长度2米,弯曲半径不小于25毫米。放大器面板上设有四位数字显示器,用于显示接收光强度数值。操作人员通过示教按钮设定检测阈值,将空载时的接收光强数值加上200作为阈值。当螺丝到达时光束被遮挡,接收光强下降至阈值以下,输出状态改变。传感器的响应时间为0.1毫秒,适应每分钟60个螺丝的锁付节拍。光纤探头表面为玻璃材质,接触油污后透光率下降。维护人员使用无尘纸蘸取酒精擦拭探头端面,每月一次。光缆与放大器连接处使用锁紧螺母固定,防止振动松动。放大器消耗电流为30毫安,输出为NPN集电极开路。独自调节各区域灵敏度,精细化管理不同风险等级。安徽AI防护防撞传感器方案设计
传感器
大型游乐设施、互动展项、VR体验区等场所,存在设备运动与游客之间的碰撞风险。传统方案依赖操作员目视监控,疲劳或注意力分散时极易发生意外。大德恒通AI大模型防撞传感器可部署在游乐设备周边,实时检测是否有游客进入危险区域。一旦检测到入侵,传感器可联动设备减速、停机或触发声光报警。由于传感器能够区分人与物体,不会因游客携带的背包、气球等物品而误报。IP65防护等级和宽温工作特性,使其能够适应室外游乐场的日晒雨淋。对于游乐场运营商而言,加装防撞传感器是提升游客安全、降低运营风险的有效手段。上海人物与区分识别防护防撞传感器售后服务传感器可识别人员肢体部位,伸手进入危险区也能检测。

自动复位和手动复位是两种常见的安全设备复位方式,适用于不同的管理场景。大德恒通防撞传感器同时支持两种模式,用户可根据实际需求选择。自动复位模式下,人员离开危险区域后传感器自动恢复输出,设备可继续运行,适合连续自动化产线,减少人工干预。手动复位模式下,人员离开后传感器仍保持报警状态,需要操作人员按下复位按钮才能***报警并恢复设备运行,适合高危设备或需要人工确认安全后才能重启的场景。用户还可通过绿色复位线灵活接线,实现两种模式的切换或组合使用。
立体空间防护传感器在玻璃搬运机器人中的应用体现在破损检测功能上。玻璃板材在搬运过程中容易因边角碰撞而产生裂纹。传感器安装在机器人吸盘架的四个角落,测量玻璃边缘与吸盘架边框之间的距离。当玻璃边缘某处距离传感器数值突然增大时,说明该处玻璃出现缺角或碎裂。机器人收到信号后停止搬运动作,将玻璃板材放置在**近的下料台上。同时控制系统记录该板材的位置信息,便于后续人工检查。传感器采用红外对射方式,发射端与接收端分别安装在吸盘架的两侧。玻璃板材边缘通过时光束被遮挡,接收端信号消失。板材边缘位置发生变化时,光束重新导通。这种检测方式不接触玻璃表面,避免划伤或施加额外应力。传感器外壳使用聚碳酸酯材料,韧性较好且透明度高。维护人员每班次开始时使用标准测试片验证传感器功能,将测试片插入光路中观察输出信号变化。供电电压为12伏直流,输出信号接入机器人的安全输入端子。在玻璃堆垛工序中,传感器还用于确认每一层玻璃之间是否放置了隔垫。隔垫缺失时传感器检测到的距离特征与正常状态不同,机器人会暂停并发出提示。粉色与橙色为第二组输出,支持常闭干接点信号。
不同设备、不同工位的安全风险往往各不相同。有的区域需要高灵敏度检测微小入侵,有的区域则只需防止人员整体进入。大德恒通防撞传感器支持每个检测区域的灵敏度**调节,且可自由匹配不同的I/O开关量输出。这意味着,您可以在同一台设备上,将危险区域划分为多个不同等级的防护区:例如,**危险区设置高灵敏度,一旦有人靠近立即停机;**警戒区设置较低灵敏度,*触发蜂鸣器提醒。这种精细化的分级防护,既保证了关键区域的安全,又避免了过度频繁停机对生产的影响。传感器还支持多场景存储,不同工序可调用不同防护方案,真正实现“一台传感器,应对多种风险”。整厂自动化生产线可统一部署,监控所有传感器状态。广东注塑机防护防撞传感器智能调节
反应速度25Hz,每秒25次检测,连续无间断。安徽AI防护防撞传感器方案设计
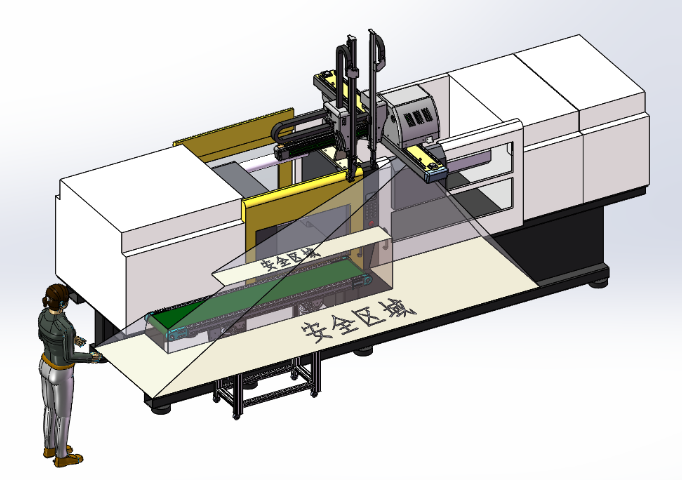
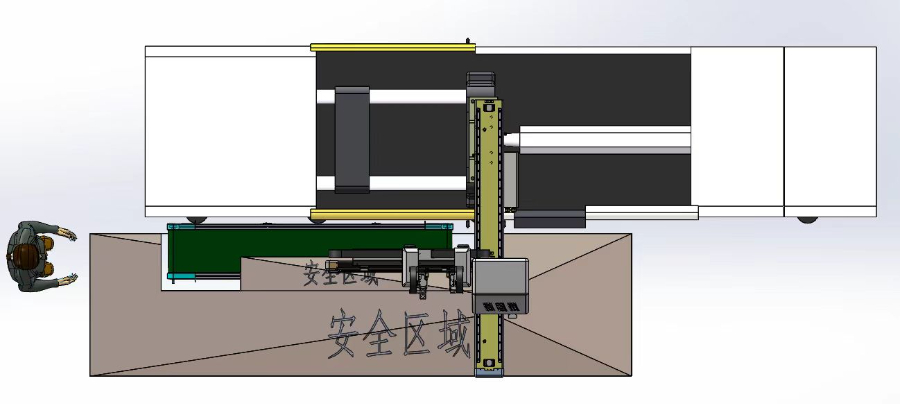
自动化龙门铣床加工大型工件时,龙门框架移动速度较慢但惯性较大。立体空间防护传感器安装在龙门两侧的立柱上,向前后两个方向发射探测波束。当操作人员在龙门行程范围内进行测量或检查时,传感器持续监测人员位置。传感器内部将空间划分为三个区域,每个区域对应不同的设备响应。**外层区域为警告区,人员进入时控制室内蜂鸣器发出间断响声。中间区域为减速区,人员进入时龙门进给速度从每分钟2米降至每分钟0.5米。**内层区域为停止区,人员进入时龙门驱动电机抱闸吸合,运动完全停止。区域边界的距离值通过传感器面板上的按键设定。操作人员根据现场实际情况将停止区边界设置在夹具边缘向外300毫米处。传感器的检测精度在满量程范围内保持一致性。测量距离为5米时误差不超过正负25毫米。安装时使用水平仪校准传感器支架,确保波束轴线与地面平行。接线使用快速插拔接头,更换传感器时不需要重新剥线。安徽AI防护防撞传感器方案设计
深圳市大德恒通科技有限公司汇集了大量的优秀人才,集企业奇思,创经济奇迹,一群有梦想有朝气的团队不断在前进的道路上开创新天地,绘画新蓝图,在广东省等地区的机械及行业设备中始终保持良好的信誉,信奉着“争取每一个客户不容易,失去每一个用户很简单”的理念,市场是企业的方向,质量是企业的生命,在公司有效方针的领导下,全体上下,团结一致,共同进退,**协力把各方面工作做得更好,努力开创工作的新局面,公司的新高度,未来深圳市大德恒通科技供应和您一起奔向更美好的未来,即使现在有一点小小的成绩,也不足以骄傲,过去的种种都已成为昨日我们只有总结经验,才能继续上路,让我们一起点燃新的希望,放飞新的梦想!




- 天津人物区分防护防撞传感器技术指导 2026-06-28
- 中国香港人形防护防撞传感器智能调节 2026-06-28
- 江苏人物与区分识别防护防撞传感器设备制造 2026-06-28
- 陕西机械手机器人防护防撞传感器方案设计 2026-06-28
- 福建立体安全防护防撞传感器设备制造 2026-06-28
- 安徽机械手失控防护防撞传感器可切换多场景防护区域 2026-06-28
- 黑龙江立体安全防护防撞传感器 2026-06-28
- 广东机器人防撞传感器技术指导 2026-06-28




- 01 安徽生物组培实验室规划建设
- 02 湖南可移动工具车功能
- 03 广东通用氛围灯检测校准厂家
- 04 直销离心机规格尺寸
- 05 河南非标液相色谱购买
- 06 山东高速分拣桁架机械手生产厂家
- 07 附近HCC静音管道送风机源头厂家
- 08 宝山区水切割机最大切割厚度
- 09 北京3C 产品表面装饰涂料研发
- 10 手冲ETHIO COFFEE挂耳咖啡热量